85
[10] Perform home return.
Overview of operation on the teaching pendant
On the RCM-T, select the “Edit/Teach” screen, bring the cursor to “*Home” in the sub display
area, and then press the Return key.
On the RCM-E, select the “Teach/Play” screen, scroll until “*Home Return” is displayed, and
then press the Return key.
[11] Set a target position in the “Position” field of the position table.
Set a target position in the “Position” field of each position table.
Determine a desired target position by fine-adjusting the load and hand via jogging or inching.
Also adjust the servo gain, if necessary.
* Once a target position has been set, other fields (speed, acceleration/deceleration, positioning
band, etc.) will be automatically populated by their default values. Set optimal values for the speed,
acceleration/deceleration, positioning band, etc.
* For safety reasons, it is recommended that the safety speed be enabled during the initial
movement.
To move the actuator at the actual speed set in the “Speed” field of the position table, change the
MANU operation mode to [Teaching mode: Disable safety speed].
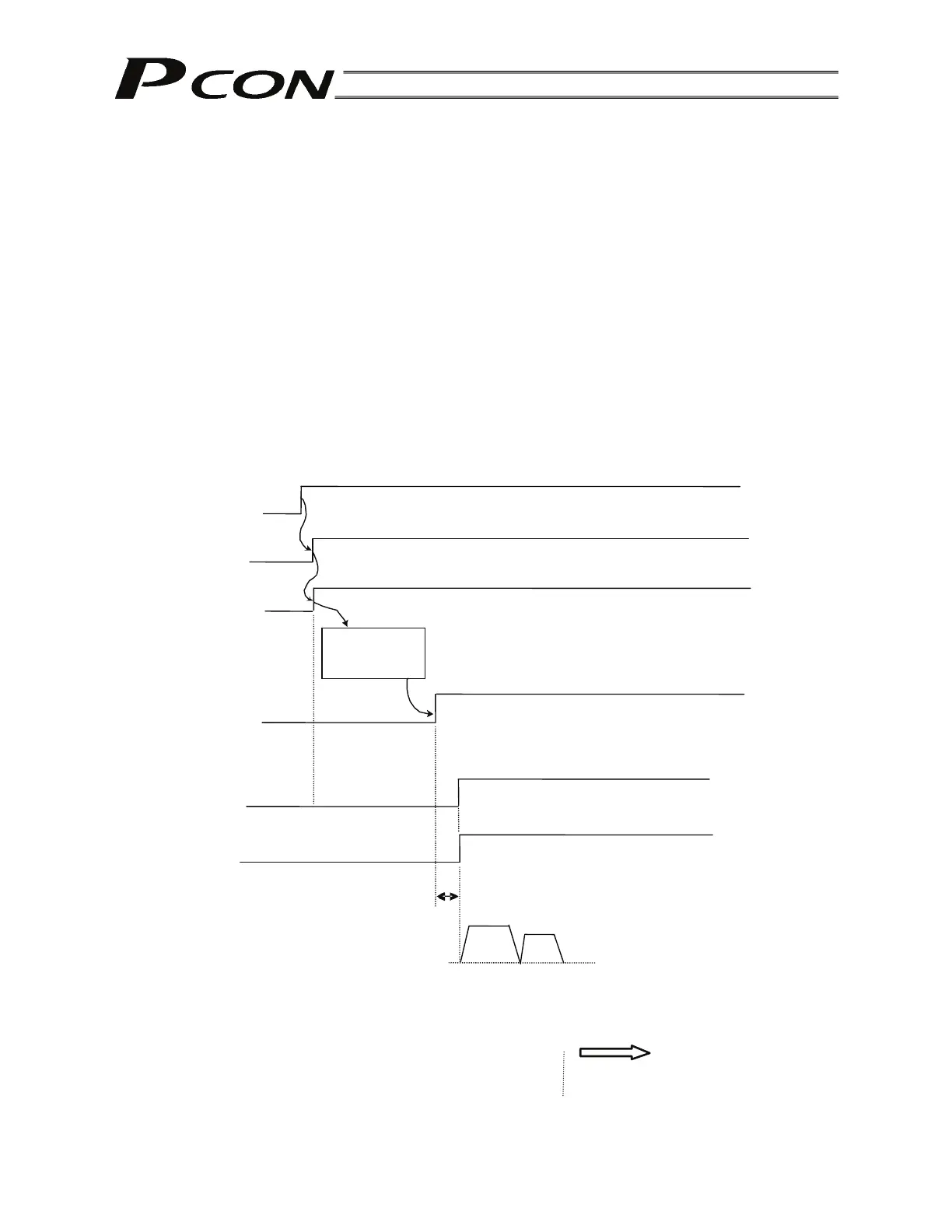
Home return operation
Home position
Mechanical end
Power on position
Emergency stop not actuated (motor drive power supplied)
Safety circuit condition
Supply of
24-VDC I/O power
Supply of 24-VDC
controller power
Servo ON
operation
Monitor LED
[SV/ALM]
Ready (SV)
n orange light
comes on initially
for 2 seconds and
then turns off.
Initial parameter
settings
170 msec or less
Green
Set a target position in the “Position” field
of the position table via PC or teaching
pendant operation
lso set optimal values for other items.