96
Position table (Field(s) within thick line must be entered.)
No.
Position
[mm]
Speed
[mm/s]
Acceleration
[G]
Deceleration
[G]
Push
[%]
Positioning
band [mm]
0 * * * * * *
1 280.00 200.00 0.30 0.30 50 15.00
2 40.00 100.00 0.30 0.30
0
0.10
:
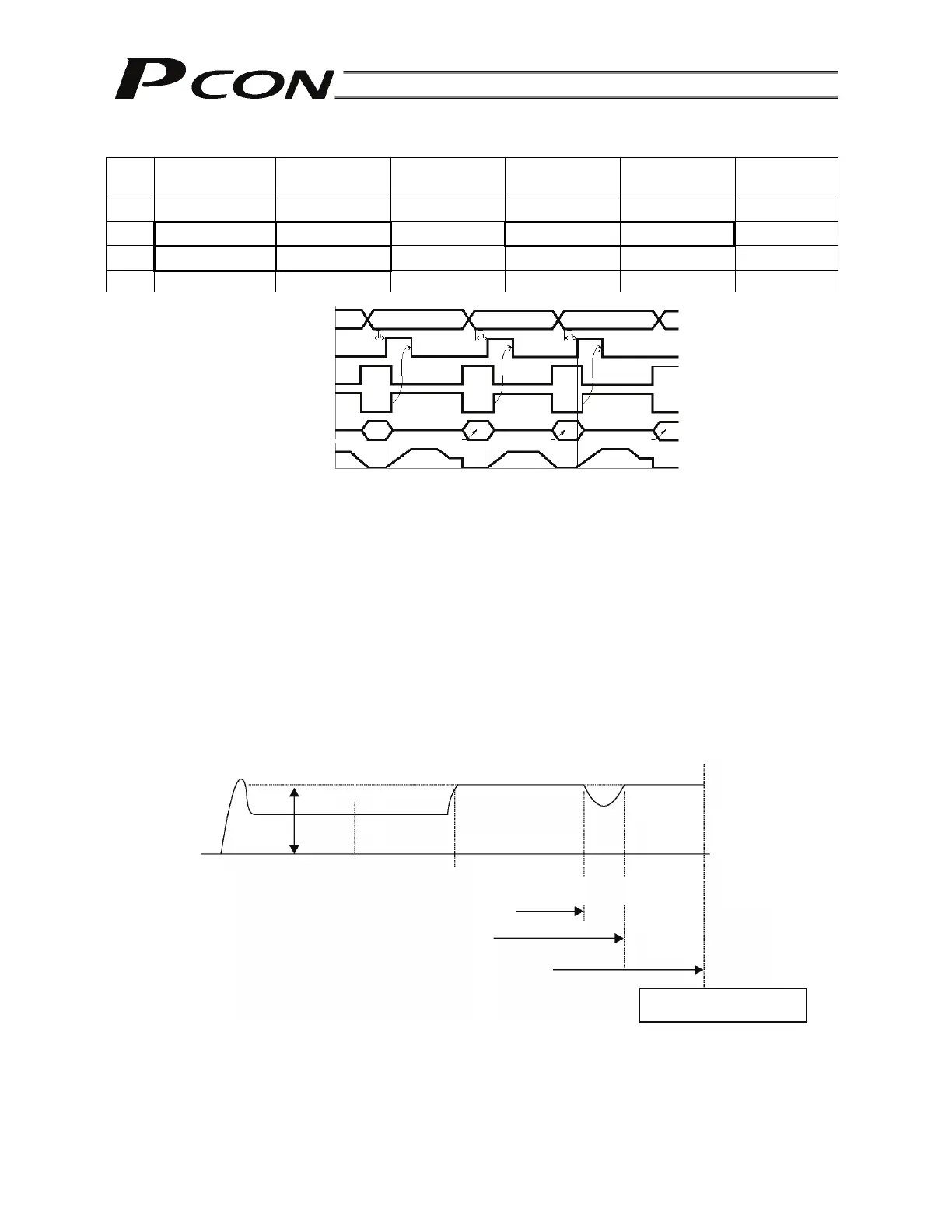
T1: 6 msec or more; time after selecting/entering a command position until the start input turns ON
(The scan time of the host controller must be considered.)
Each command position must be input after the position complete output has turned ON for the movement
to the previous position.
Conditions for determining completion of push & hold operation
Push & hold operation is deemed to have completed upon elapse of the time set by parameter No. 6
(Push completion judgment time) after the motor current reached the current-limiting value set in the
“Push” field of the position table.
Set an appropriate value by considering the material and shape of the load, and so on.
The minimum setting unit is “1 msec,” while the maximum value is “9999 msec.” The factory setting is “255
msec.”
(Note) The chart below explains how completion of push & hold operation is determined if the load
shifted during the judgment and the current has changed as a result, based on a judgment time of
255 msec.
If the motor current remains at or above the push current for 200 msec and then drops below this level for
20 msec, the count will decrease by 20. When the push current is reached again thereafter, counting will
start from 180. If the motor current remains at or above the push current for 75 msec, the count will
increase to 255 and thus push & hold operation will be deemed to have completed.
In total, 295 msec was required for the judgment.
Command position
Start
Position complete
Moving
Completed position
Actuator movement
Position 1 Position 2 Position 1
Note Note Note
Position 1 Position 2 Position 1
Speed
Push current
Starting position Target position Counting starts.
The count increases to 200.
The count decreases to 180.
The count increases to 255.
Push & hold operation is
deemed to have completed.
20 msec
75 msec
 Loading...
Loading...








