151
Code Error name Cause/Action
0A3 Position command
information data error
Cause: The speed or acceleration/deceleration effective when the
numerical command was issued exceeded the maximum settable
value.
Action: Change the speed or acceleration/deceleration to an appropriate
value.
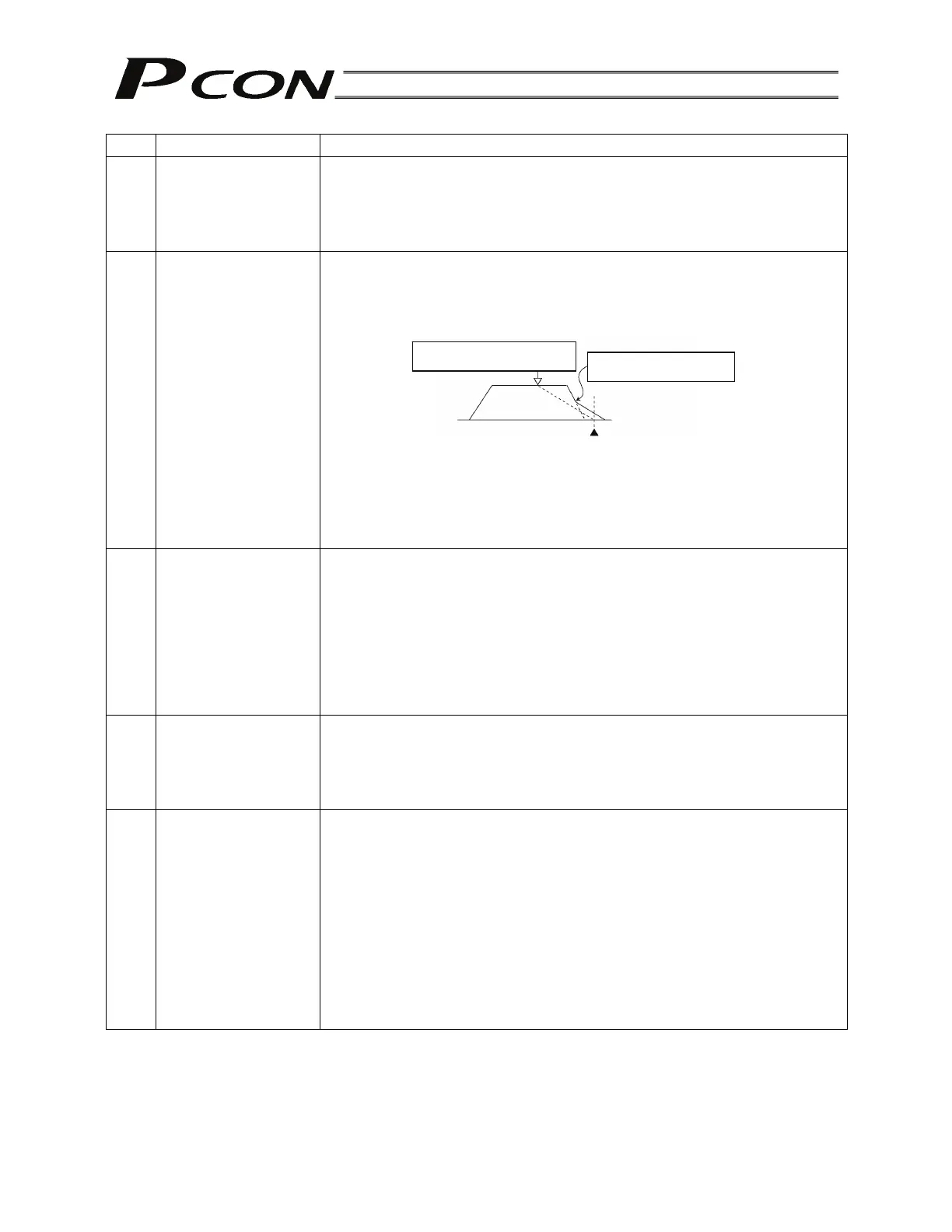
If a position command is issued while the actuator is moving where the
target position corresponding to the position number is located near a soft
limit and the deceleration is also set low, the actuator may move past the
soft limit.
0A7 Deceleration
command error
Cause: When the speed was changed during movement, the next move
command was not issued quick enough.
Action: Quicken the speed change timing so that the actuator will not
overshoot the soft limit.
0BA Home sensor not
detected
This error indicates that the actuator equipped with the home check sensor
has not yet successfully completed the home return operation.
Cause: [1] The load contacted any surrounding equipment or structure
during home return.
[2] The slide resistance of the actuator is high in some location.
[3] The home check sensor is not properly installed, faulty or
open.
Action: If the load is not contacting any surrounding equipment or
structure, [2] or [3] is suspected. Please contact IAI.
0BE Home return timeout Cause: Home return does not complete after elapse of the time set by the
applicable manufacturer’s parameter following the start of home
return operation. (This error does not occur in normal operations.)
Action: The controller and actuator combination is wrong, among others.
Please contact IAI.
0C0 Excessive actual
speed
Cause: The motor speed exceeded the maximum level set by the
applicable manufacturer’s parameter. Although this error does not
occur in normal operations, it may occur if the load decreased
before a servo error was detected and the actuator moved quickly
as a result, which can be caused by various reasons including the
following:
[1] The slide resistance of the actuator is high in some location.
[2] The load increased due to momentary application of external
force.
Action: Check the assembly condition of mechanical parts for any
abnormality.
If the actuator itself is suspected as the cause, please contact IAI.
Deceleration starting position not
resulting in soft limit overshoot
If a command is issued here,
soft limit overshoot will occur.
Soft limit

 Loading...
Loading...







