/74
R2 CAN Installation manual
The Extended data sheet for IRMA MATRIX contains a detailed description of the
nameplate.
“Door Address/Door Contact Input (1…4, for Gateway only)” – The door contact input
starts or stops the counting operation of the IRMA MATRIX sensor.
In case of an existing CAN gateway installation the door contact input corresponds to the
door signal inputs of the gateway. The corresponding value must be between 1 and 4 and
is assigned to just one sensor or one sensor group.
With an Ethernet installation the setting value for the “Door Address” is, as a rule, identical
to the “Function Area Address” (FA).
“Door Close Delay” - (only on the CAN BUS with gateway) - The parameter determines for
which period of time after the “Close door” signal the door will still be monitored and
persons can be counted (setting range: 0 to 65,535 ms = 1 min 09 s).
Determine the time between the door closing signal sent by the on-board computer and
the actual mechanical closing of the door and enter this value.
“Door Polarity” - (only on the CAN BUS with gateway) - Here the door contact polarity can
be selected as either “logically positive” or “logically negative”,
logically positive meaning: 0 V = “Door closed2; 24 V = “Door open”
logically negative meaning: 0 V = “Door open”; 24 V = “Door closed”
If several signal sources are present on the vehicle, set "negative"
8
, since the counting is
still active when the door is open and the ignition is switched off.
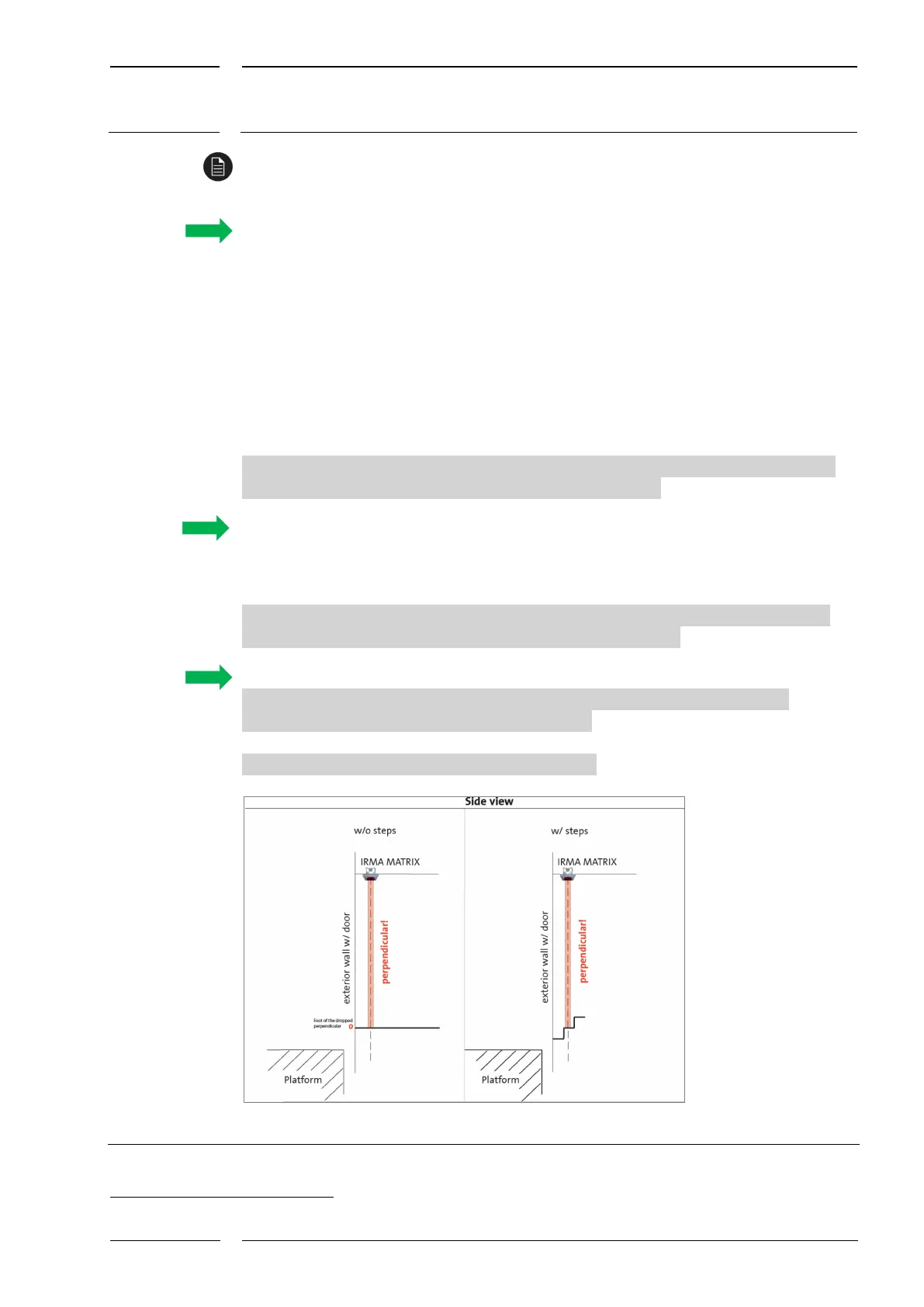
“Mounting Height” - indicates the mounting height of the sensor in mm.
Drop a perpendicular from the sensor centre to the floor and mark the foot of the
perpendicular on the floor with an adhesive marker.
The distance from the sensor to the adhesive marker is the mounting height.
Measure the distance and enter the value measured.
Fig. 33: Sector “Mounting Height”
8
The door polarity (door logic) must be set according to the signal sources in the vehicle.