5 Motor control & motor settings
5.14 Parameterising the V/f characteristic control
155
Lenze · i700 servo inverter · reference manual · DMS 3.0 EN · 06/2016 · TD06
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
5.14.6 Setting the slip compensation
The slip compensation serves to automatically compensate for a load-dependent speed deviation.
The rated slip of the motor is required to ensure that the slip compensation can work correctly.
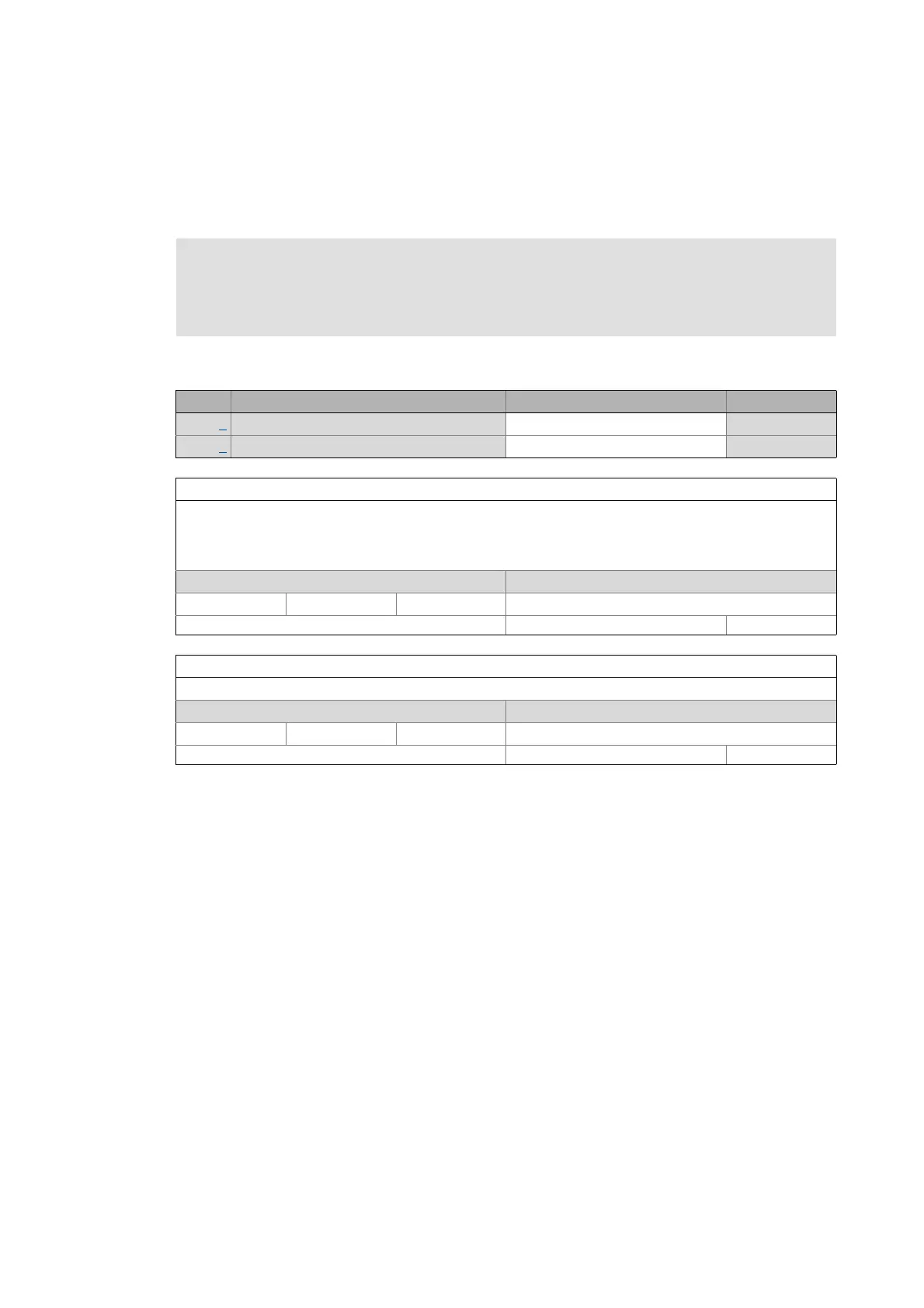
0x2B09 | 0x3309 - VFC: Slip compensation - Parameter
Note!
Observe correct parameterisation of the rated motor frequency and the rated motor
speed. Both parameters serve to calculate the rated motor slip.
Sub. Name Lenze setting Data type
1 VFC: Slip compensation - influence 0.00 % INTEGER_16
2 VFC: Slip compensation - filter time 2000 ms UNSIGNED_16
Subindex 1: VFC: Slip compensation - influence
Adjustment of the slip calculated
Required due to deviations (tolerances) between the real motor data and the nameplate data.
• For instance, with a setting of 100 %: fully effective slip compensation (assumption: at rated load, the values for
the real slip and calculated slip are equal.)
Setting range (min. value | unit | max. value) Lenze setting
-200.00 % 200.00 0.00 %
Write access CINH OSC P RX TX Scaling: 1/100 INTEGER_16
Subindex 2: VFC: Slip compensation - filter time
Adjustment of the time-dependent behaviour of the slip compensation
Setting range (min. value | unit | max. value) Lenze setting
1 ms 6000 2000 ms
Write access CINH OSC P RX TX UNSIGNED_16