Lenze · i700 servo inverter · reference manual · DMS 3.0 EN · 06/2016 · TD06 302
10 Service/internal
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
10 Service/internal
Objects described in this chapter
0x2DD0 | 0x35D0 - field: Values
0x2DD1 | 0x35D1 - motor: Currents
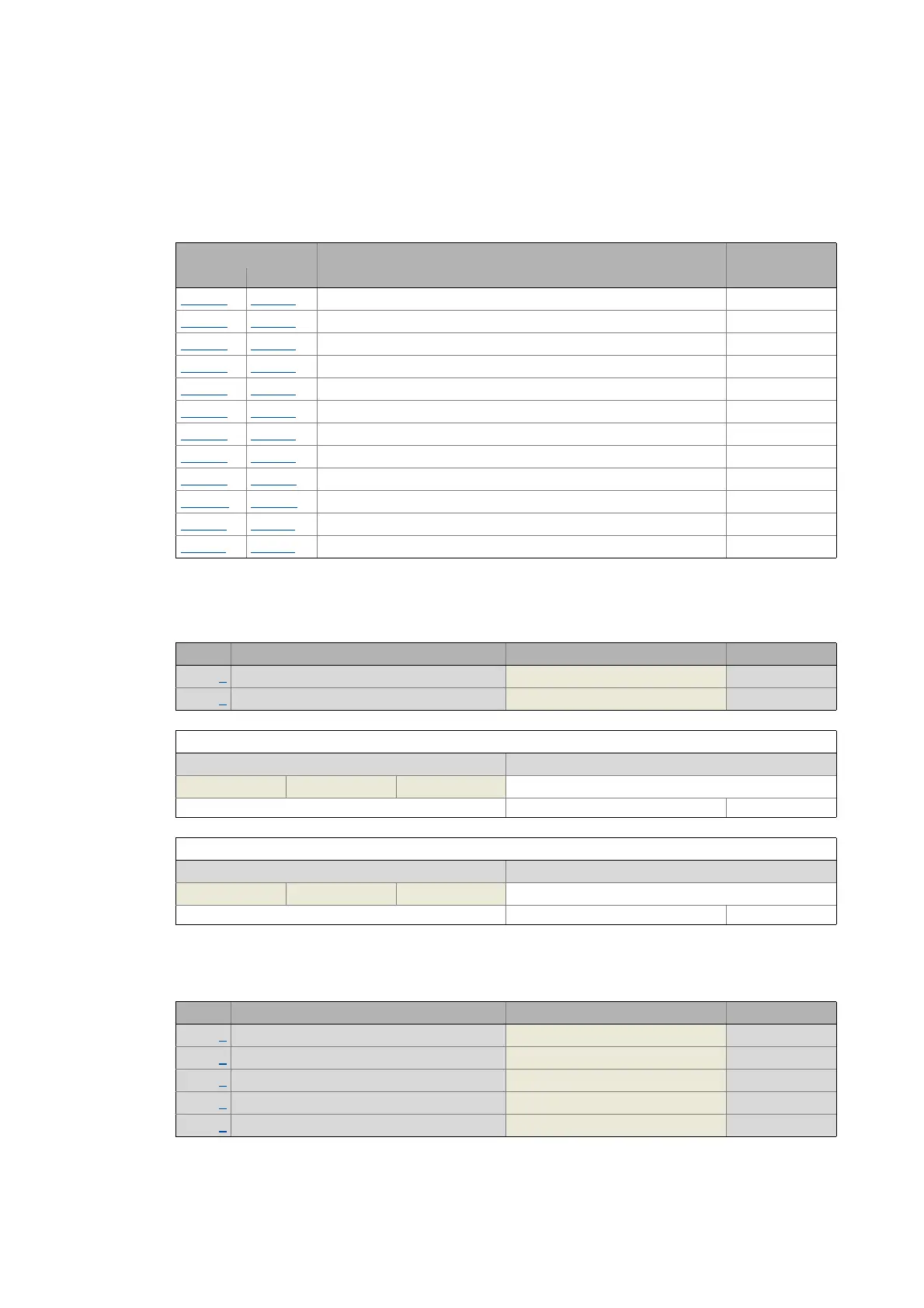
Object Name Data type
Axis A Axis B
0x2DD0 0x35D0 Field: Values RECORD
0x2DD1
0x35D1 Motor: Currents RECORD
0x2DD2
0x35D2 Position: Target position interpolated INTEGER_32
0x2DD3
0x35D3 Target speeds RECORD
0x2DD4
0x35D4 Speed controller: Output signal RECORD
0x2DD5
0x35D5 Target torque INTEGER_32
0x2DD6
0x35D6 Torque: Filter cascade RECORD
0x2DD7
0x35D7 Voltage values RECORD
0x2DDC
0x35DC Slip: Actual slip INTEGER_16
0x2DDD
0x35DD Device: Actual output frequency INTEGER_16
0x2DDE
0x35DE Motor: Actual position of rotor angle INTEGER_16
0x2DDF
0x35DF Axis: Device data RECORD
Sub. Name Lenze setting Data type
1 Field: Actual field UNSIGNED_16
2 Field: Field setpoint 0% UNSIGNED_16
Subindex 1: Field: actual field
Display area (min. value | unit | max. value) Initialisation
0 % 65535
Write access CINH OSC P RX TX UNSIGNED_16
Subindex 2: Field: target field
Display area (min. value | unit | max. value) Initialisation
0 % 65535 0 %
Write access CINH OSC P RX TX UNSIGNED_16
Sub. Name Lenze setting Data type
1 D-current (id): Actual D-current INTEGER_16
2 Q-current (iq): Actual Q-current INTEGER_16
3 D-current (id): D-current setpoint INTEGER_16
4 Q-current (iq): Q-current setpoint INTEGER_16
5 Motor current Ieff INTEGER_16