Lenze · i700 servo inverter · reference manual · DMS 3.0 EN · 06/2016 · TD06 30
3 Communication with the controller
3.5 Lenze control and status word
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
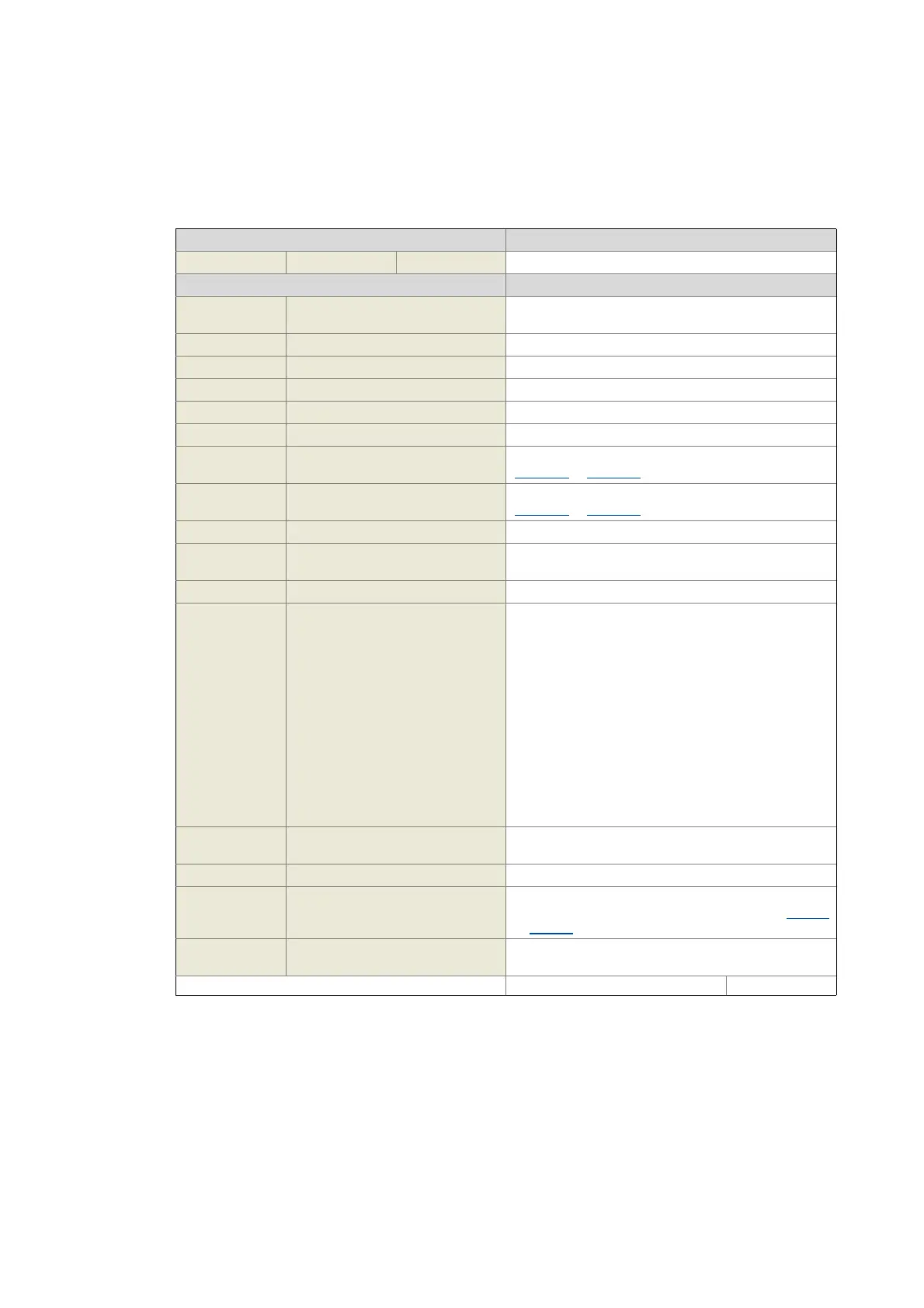
0x2831 | 0x3031 - Lenze status word
0x2833 | 0x3033 - Lenze statusword 2
In the Lenze status word, messages are combined that go beyond the CiA specification.
Display area (min. value | unit | max. value) Initialisation
0x0000 0xFFFF
Value is bit-coded: Info
Bit 0 Position controller: In limitation Position mode: Output of the position controller in
limitation
Bit 1 Speed: Limited speed setpoint 1 Input of speed controller 1 in limitation
Bit 2 Speed controller: In limitation Output of speed controller 1 in limitation
Bit 3 Torque: Limited target torque Target torque in limitation
Bit 4 Motor: Limited current setpoint Setpoint current in limitation
Bit 5 Speed: Limited speed setpoint 2 Torque mode: Input of speed controller 2 in limitation
Bit 6 Upper speed limit is active Torque mode: Speed is limited to the upper speed limit
(0x2946:1
or 0x3146:1 for axis B)
Bit 7 Lower speed limit is active Torque mode: Speed is limited to the lower speed limit
(0x2946:2
or 0x3146:2 for axis B)
Bit 8 Flying restart in progress ... V/f operation: "Flying restart process" function is active
Bit 9 Flying restart: Ready for operation V/f operation: "Flying restart process" function has
acquired speed
Bit 10 Limited output frequency Setpoint frequency in limitation
Bit 11 Asynchronous motor magnetised In case of servo control for synchronous motor (SM):
• Bit is always set.
In case of servo control for asynchronous motor (ASM):
• Bit is set if the difference between setpoint and actual
flux is smaller than 10 % of setpoint flux.
• Bit is reset if the difference has increased to 15 % of
setpoint flux.
In case of V/f operation:
• Bit is set if the rotor time constant has been passed
seven times, calculated from the time the controller
has been enabled and no restart on the fly has been
active and the total motor current has reached 20 %
of the rated motor current for the first time.
Otherwise 0.
Bit 12 Motor phase failure detection in
progress ...
Motor phase failure detection is active
Bit 13 Feedback: Open circuit Position feedback is interrupted
Bit 14 Delay time: 'Reset error' is active The error cannot be reset before the delay time has
expired. The remaining delay time is displayed in 0x2840
(or 0x3040
for axis B).
Bit 15 Clamp is active V/f operation: Clamp (short-time inhibit of the inverter)
is active
Write access CINH OSC P RX TX UNSIGNED_16
From version 01.03