Lenze · i700 servo inverter · reference manual · DMS 3.0 EN · 06/2016 · TD06 232
7 CiA402 device profile
7.10 Cyclic sync torque mode (cst)
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
7.10.1 Default mapping
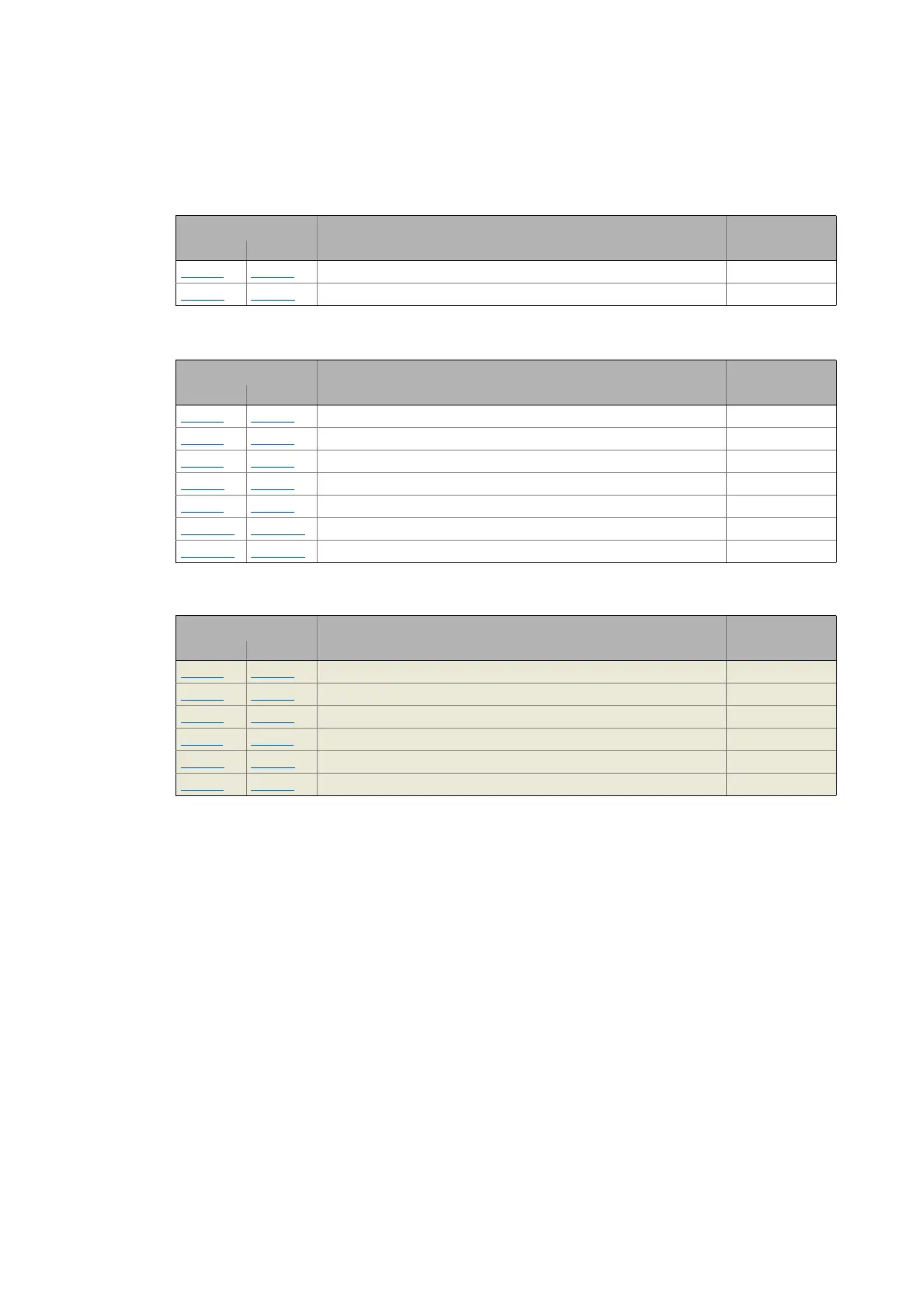
The default mapping for "Cyclic synchronous torque mode" is defined in the following objects:
Date received from the controller (RPDO)
Data transmitted to the controller (TPDO)
Object Name Data type
Axis A Axis B
0x1601 0x1611 RPDO-->Axis A/B: Cyclic sync torque mode (cst) RECORD
0x1A01
0x1A11 Axis A/B-->TPDO: Cyclic sync torque mode (cst) RECORD
Object Name Data type
Axis A Axis B
0x6040 0x6840 Controlword UNSIGNED_16
0x2830 0x3030 Lenze control word UNSIGNED_16
0x6060
0x6860 Operating mode: Selection INTEGER_8
0x60B2
0x68B2 Torque offset INTEGER_16
0x6071 0x6871 Target torque INTEGER_16
0x2946:1
0x3146:1 Speed limitation: Upper speed limit INTEGER_32
0x2946:2
0x3146:2 Speed limitation: Lower speed limit INTEGER_32
Object Name Data type
Axis A Axis B
0x6041 0x6841 Statusword UNSIGNED_16
0x2831 0x3031 Lenze status word UNSIGNED_16
0x6061 0x6861 Modes of operation display INTEGER_8
0x603F 0x683F Error code UNSIGNED_16
0x606C 0x686C Velocity actual value UNSIGNED_16
0x6077 0x6877 Torque actual value INTEGER_16