Firmware 03.00 - DMS EN 5.0 - 07/2009 L 89
8400 BaseLine D | Software Manual
Motor control (MCTRL)
Selection of the operating mode
Optimisation of the sensorless vector control in case of undesired drive behaviour
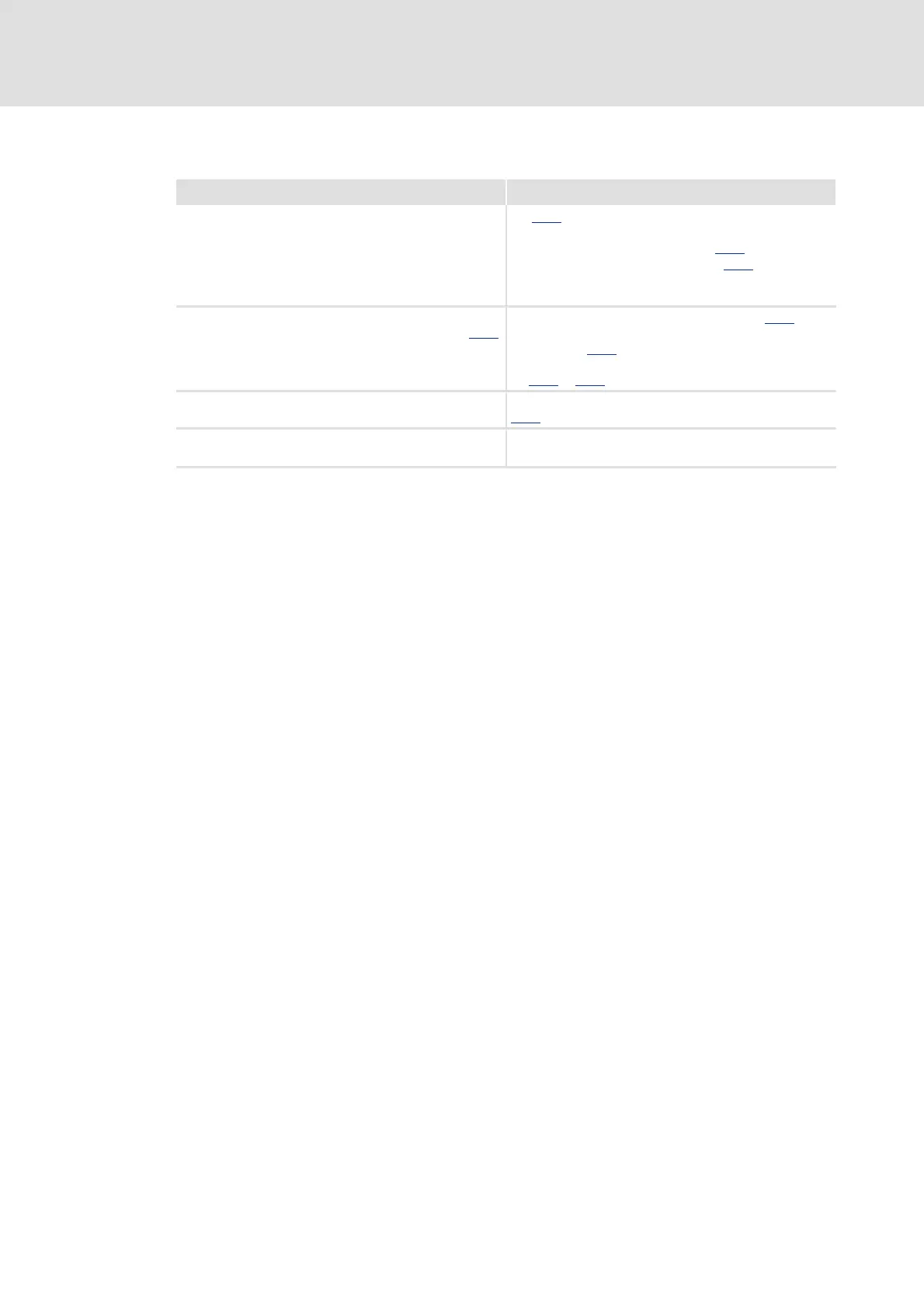
Drive behaviour Remedy
Insufficient speed constancy at high load (setpoint and
motor speed are not proportional any more)
CAUTION:
An overcompensation of the settings mentioned under "
Remedy" can result in unstable behaviour!
Via C021
(slip compensation) you can affect the speed
stability under high loads:
•If n
act
> n
slip
, reduce the value in C021
•If n
act
< n
slip
, increase the value in C021
Error messages "Short circuit" (OC1) or "Peak current
limitation clamp" (FLC) at short acceleration times C012
in proportion to the load (controller cannot follow the
dynamic processes).
• Increase the gain of the torque controller C073
• Reduce the integral-action time of the torque
controller C074
• Increase the acceleration time / deceleration time
C012
/ C013
Speed variations in no-load operation for speeds > 1/3
rated speed
The oscillation damping minimises speed variations
C234
•Drive runs unstable
• Setpoint speed and actual speed deviate strongly
Check the equivalent circuit data of the motor and the
nameplate data.
 Loading...
Loading...
