Joint Robot Manipulator - Software Operation Manual
Advantech LNC Technology Co., Ltd.
19
The Pbase, Ptool, Pwork, world coordinates, and work coordinates all include position and
attitude. The position in space is as commonly understood and commonly used (X, Y, Z), but the
space attitude is different and difficult to understand.
The space attitude is usually represented by (A, B, C). It has a specific rule, collectively called
Euler's rotation theorem, which is used to indicate the possibility of various directions. A more
detailed description can be found by searching the Internet for Euler’s rotation theorem. The
rules of Euler’s rotation theorem are not necessarily the same in each robot system.
LNC's Euler's rotation theorem is defined as ZXZ, and the universal is the right-hand rule, ie
A is the angle of rotation around the +Z axis.
B is the angle at which the axis rotates (+X after A rotation).
C is the angle at which the axis rotates (+Z after AB rotation).
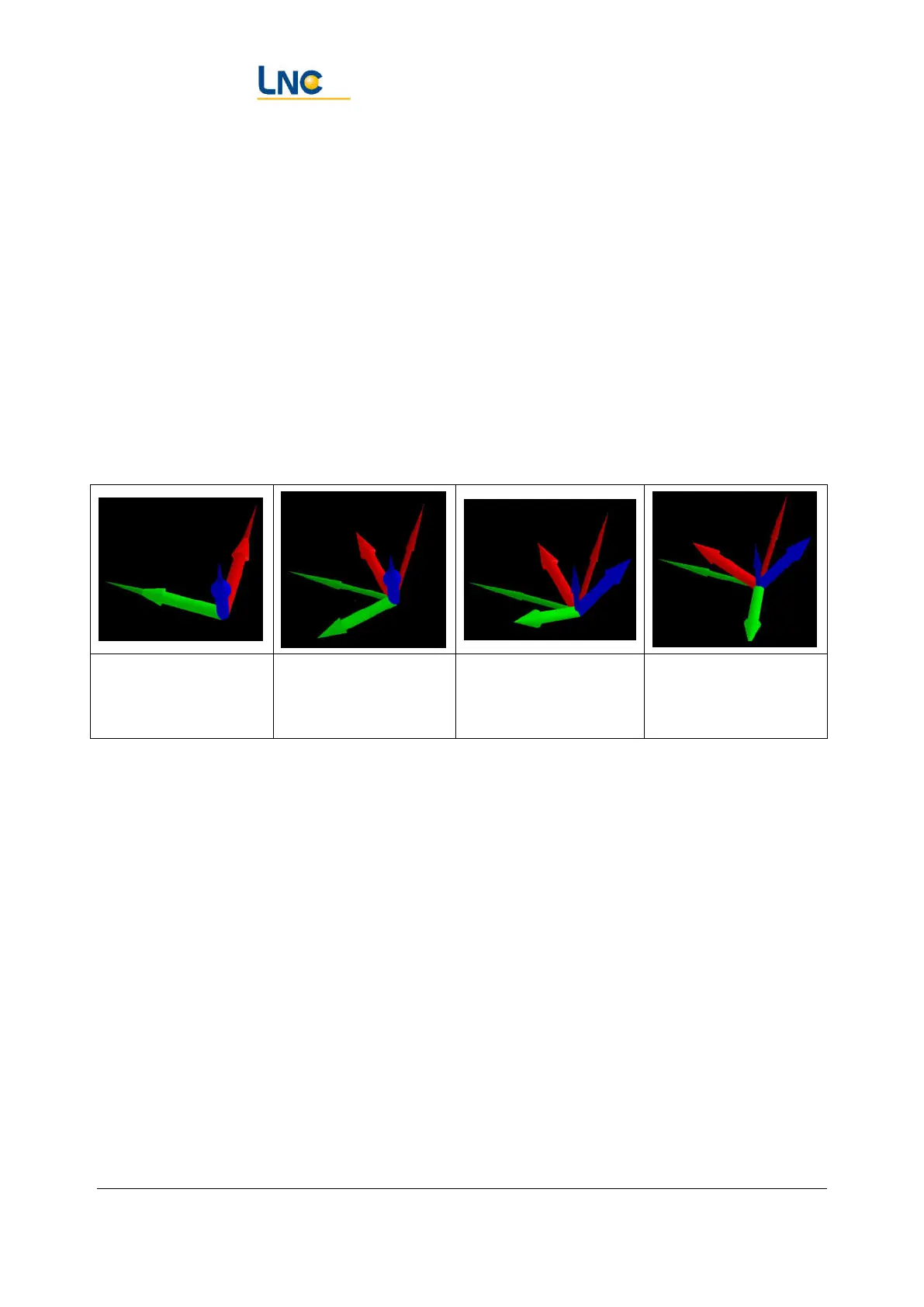
The figure below is an example:
Before rotation
(0, 0, 0)
Rotate 45 degrees
around Z
(45, 0, 0)
Rotate 30 degrees
around X
(45, 30, 0)
Rotate 30 degrees
around Z
(45, 30, 30)