Joint Robot Manipulator - Software Operation Manual
Advantech LNC Technology Co., Ltd.
32
0950~0954, 0960~0964 are on, and give the appropriate path back to the safe starting
position.
9. Coordinate system
The coordinate system is mainly used to adapt to the position relationship between the robot and
the workpiece, including the offset and rotation and tilt of the work area. The system provides 10
sets of coordinate system records to meet the needs of multiple sets of processing areas.
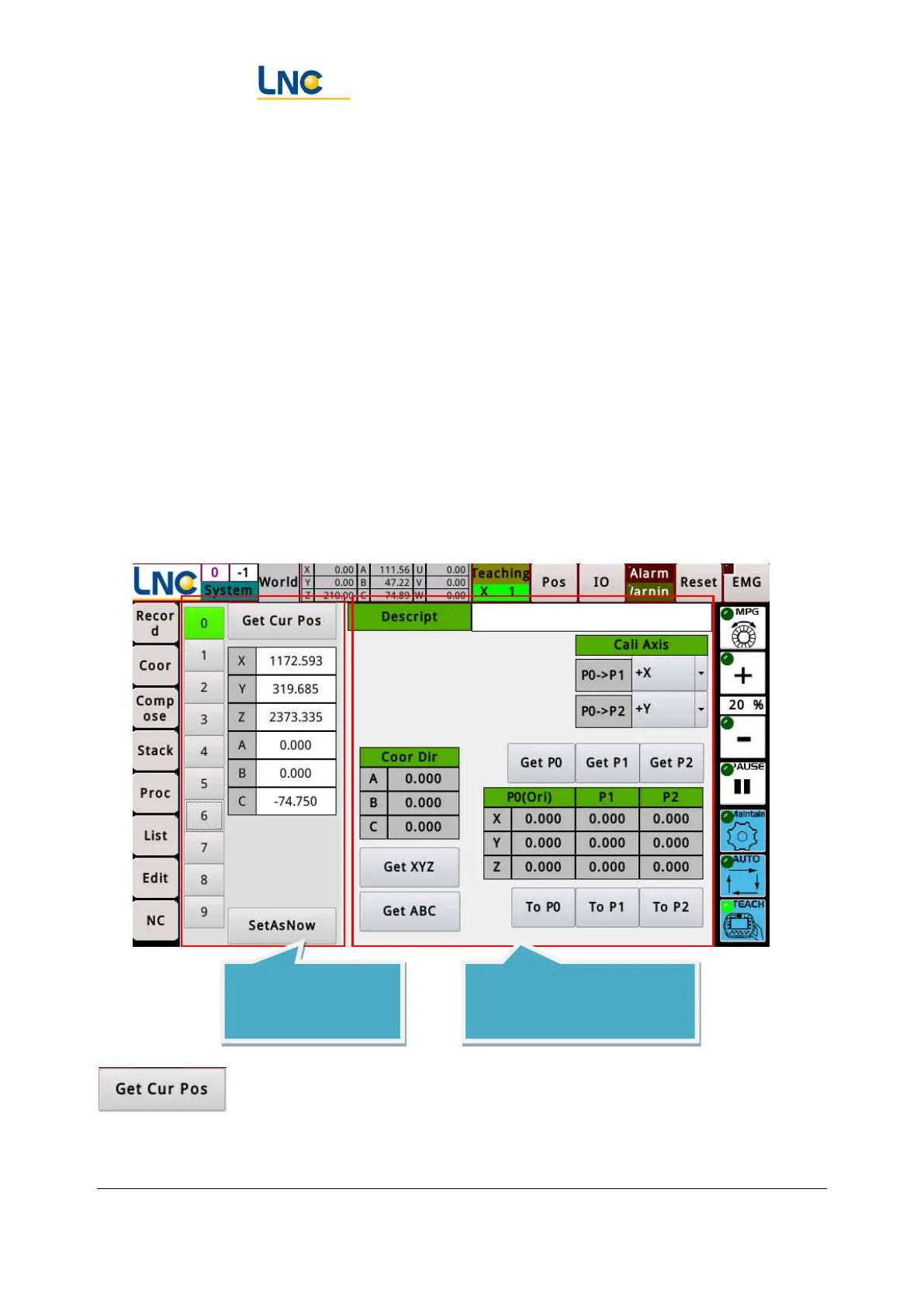
The following figure can be divided into two areas, the left side is used to view the current
coordinate system record, and the right side is a three-point coordinate system method to help
calculate the positional offset, direction rotation and tilting of the coordinate system.
After the coordinate system is determined using three points, it can be stored in the coordinate
system record for use in the program.
: bring the current world coordinates of the robot into the coordinate system
record.
View of coordinate
system record
Select three-point calibration
coordinate system