Joint Robot Manipulator - Software Operation Manual
Advantech LNC Technology Co., Ltd.
48
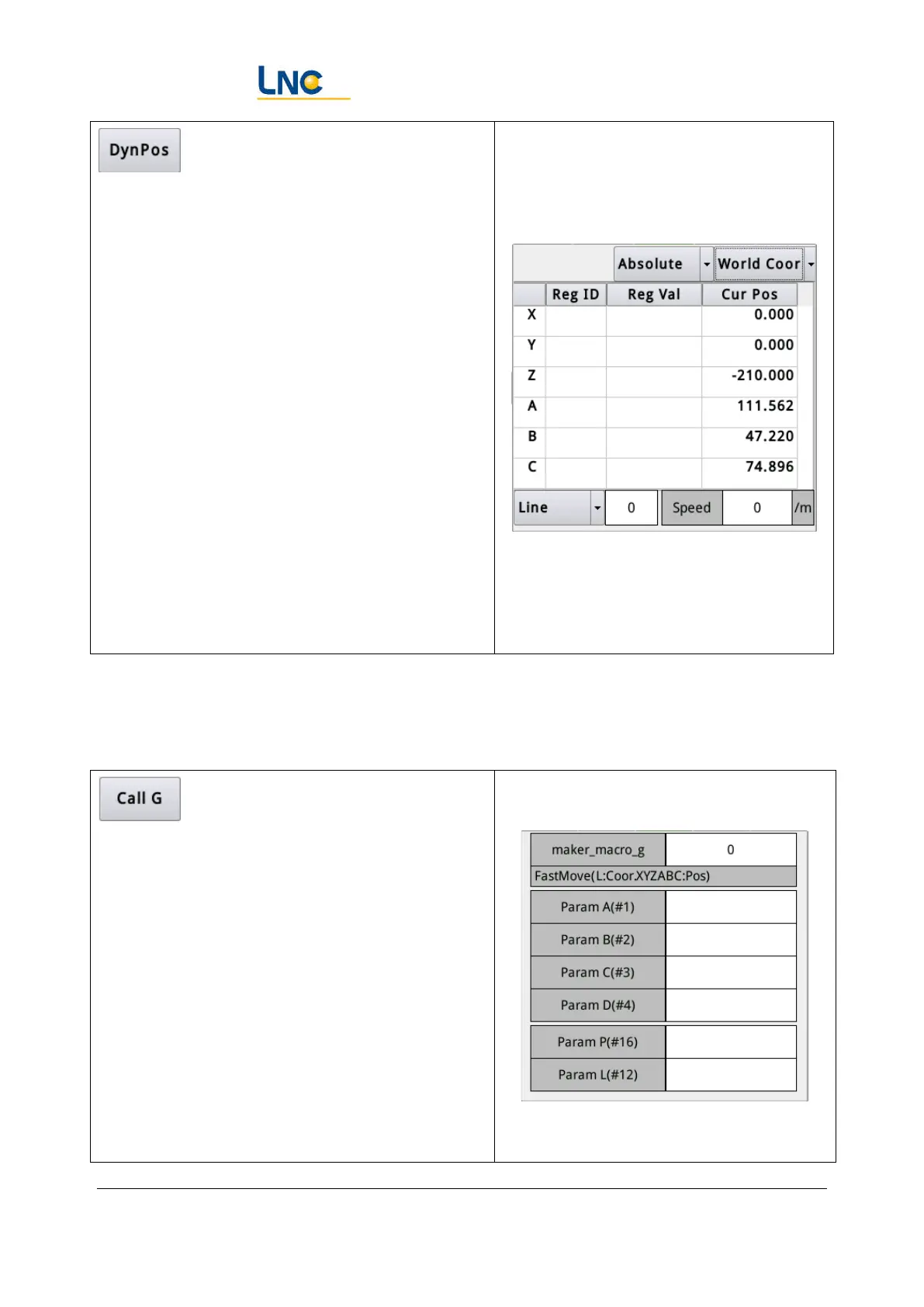
Absolute/relative: The content representing the set
value is either absolute to the selected coordinate
system or relative to the current coordinate of the
target coordinate system.
Coordinate system: the coordinate system used to
represent the contents of the set value
Number of XYZC set value: Source buffer for
obtaining XYZC coordinate information. If
this field is blank, it means that the previous
coordinates are used.
,lPoint type: fast, linear...
Flexibility: input blank or 0~5 (corresponding to
the setting of debugging page)
Speed: If the speed is 0, it means the default
moving speed is used.
-1~-100 represents the percentage of the set speed
in the debugging page.
11.1.5. Function module calling
Call G code built-in by the system or manually
written by the developer to provide greater
flexibility
Parameter A(#1) : The first parameter to be
transmitted to the G-code.
Parameter B(#2) : The second parameter to be
transmitted to the G-code.
Parameter C(#3) : The third parameter to be
transmitted to the G-code.
Parameter D(#4) : The forth parameter to be
transmitted to the G-code.
Parameter P(#16) : The fifth parameter to be