Joint Robot Manipulator - Software Operation Manual
Advantech LNC Technology Co., Ltd.
47
Paragraph distance: The position of the swing is
repeated after every certain paragraph distance on
the path.
Initial movement amount: The amount of
movement at the beginning of the process when the
movement distance is 0.
Dynamic process: Same as Start, except that the
parameters of the process are determined by
the content of the R value.
Note: When using this function, the actual
calculated process offset value must be
smaller than the “Max Range of Process”
column in the “Options Page/Run”, otherwise
the alarm will pop up.
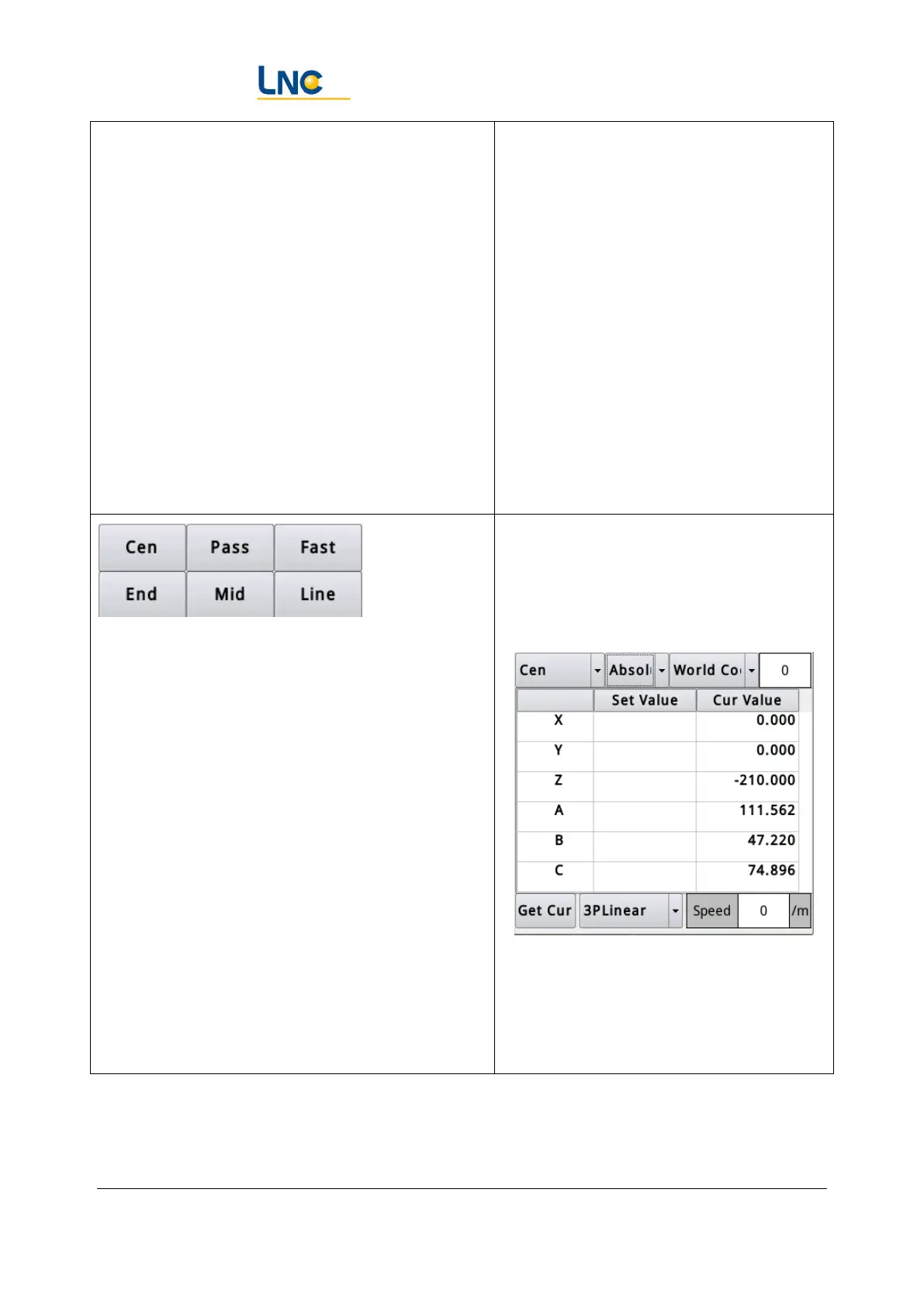
Absolute/relative: The content representing the set
value is either absolute to the selected coordinate
system or relative to the current coordinate of the
target coordinate system.
Coordinate system: the coordinate system used to
represent the contents of the set value
Flexibility: input blank or 0~5 (corresponding to
the setting of debugging page)
Set value: XYZC
Speed: If the speed is 0, it means the default
moving speed.
-1~-100 represents the percentage of the set speed
in the debugging page.
Set to the current: Fill the current coordinates of the
coordinate system into the set value
according to the selected coordinate system.