Joint Robot Manipulator - Software Operation Manual
Advantech LNC Technology Co., Ltd.
44
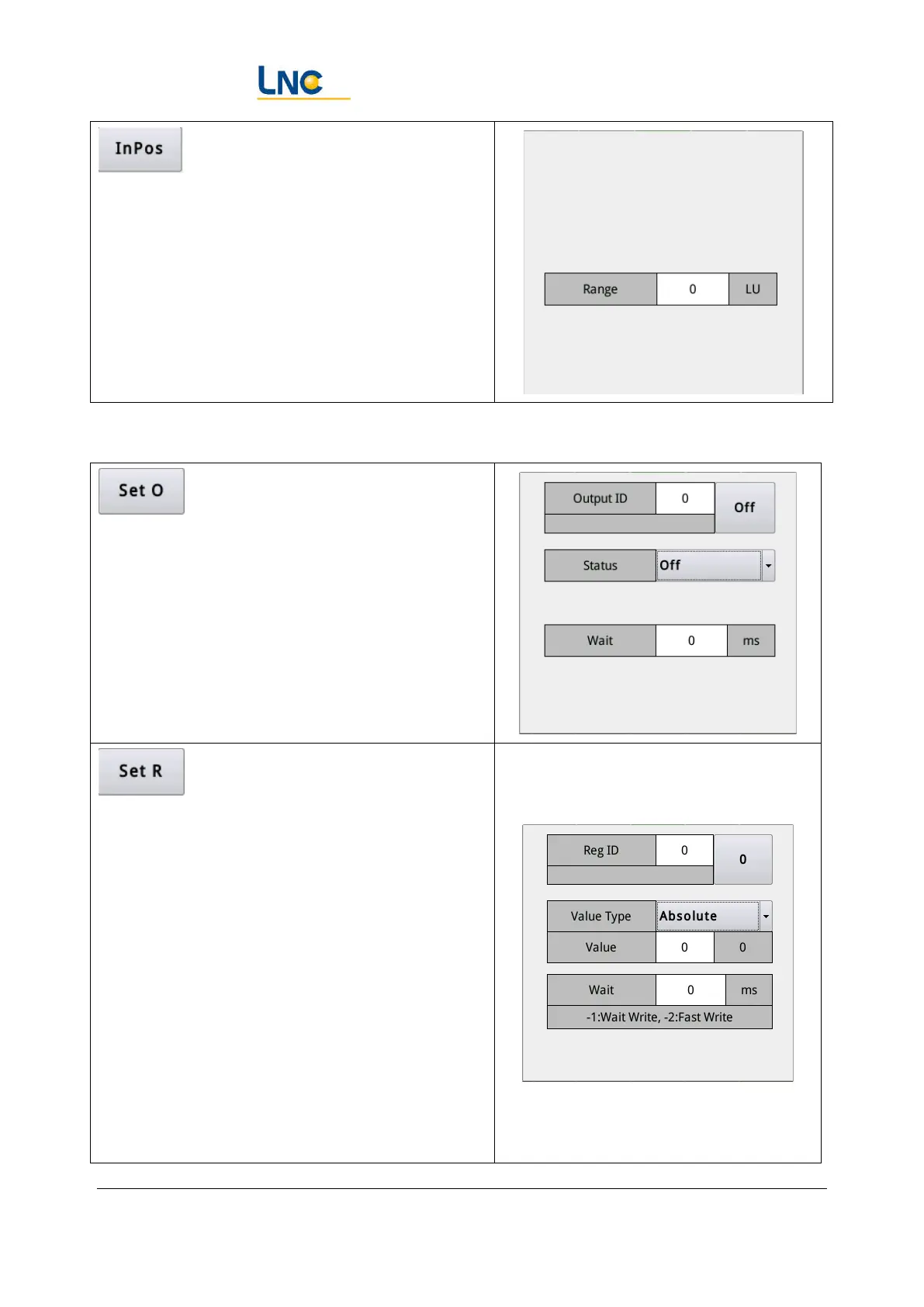
Move after waiting for arriving the position
Arriving: 1/1000 degree, or 1um
Note: The range of arriving will only be checked
after the commands have been sent. So, setting a
very large value may not have the desired effect.
11.1.3. Status setting
Set the status of point O
Number: the number of the point O
Value: Off, On, commutation (change to another
state based on the current state of the point O)
Wait: Set how long to wait before executing the
next line.
Set the content of R value
Number: the number of R value
Type of value:
Absolute: directly set the content of the R
value to the content in the "Value" field.
Relative: Accumulate the content of the Value
field based on the content of current R value.
No.: Set the R value of the specified R number
in the Value field to this R value.
Add 1 to the circulation: Add 1 to the current
R value and set it to 0 when the value is
greater than the set value in the Value field.
Value: Reference mode description