Joint Robot Manipulator - Software Operation Manual
Advantech LNC Technology Co., Ltd.
14
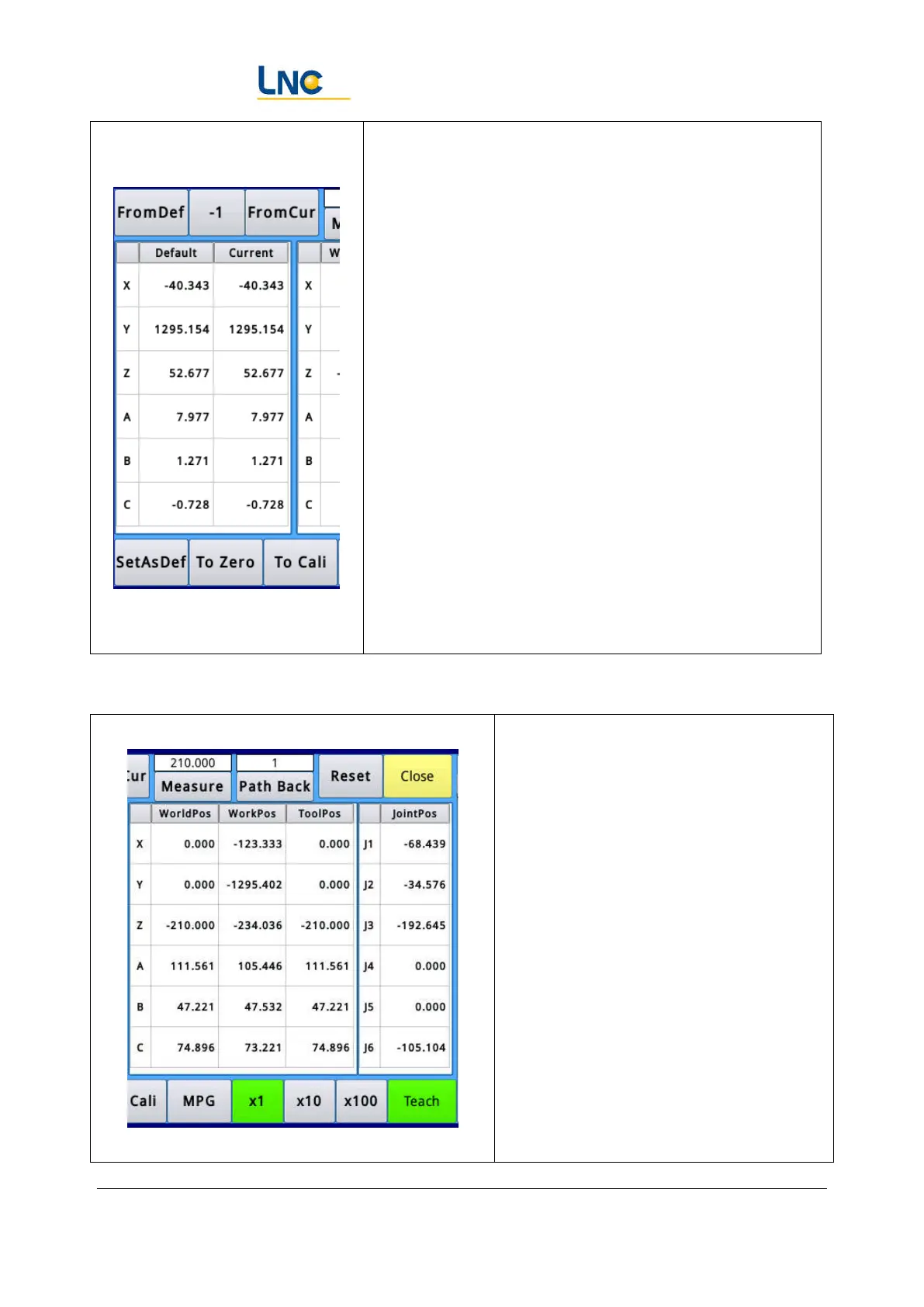
Preset bar: When startup, the system will set this set
value to the current work coordinate system. You can
enter a value on the content of the field.
Coordinate system bar: The value of the work coordinate
system currently in use, which can be entered in the
content of the field.
Select preset: re-apply the setting of the preset coordinate
system to the work coordinate system.
Select current: Set the current world coordinates to the
coordinate system value. You can also click on a field
in the world coordinates to set the value of the field to
the current coordinate system.
Set as preset: Set the current coordinate system value to
the default coordinate system for the next startup.
Origin:Move straight to the origin of the coordinate
system (move when pressed and stop when released.)
Calibration point:To the calibration point position
marked on the startup page (move when pressed and
stop when released).
3.3.2. Current coordinates display
Display current world coordinates,
work coordinates, tool coordinates
Span: Zero the current tool coordinates to
understand the distance of the
motion.
Note 1: From the tool coordinate
information, the relative relationship
between the current point and the
point when the span is pressed can
be known.
Note 2: When the "tool" of the coordinate
selection is pressed, it is equivalent
to pressing the Span key.
Path rollback: system automatically
records the path that has been
traveled. This function can be used