Joint Robot Manipulator - Software Operation Manual
Advantech LNC Technology Co., Ltd.
18
4. Introduction to basic concepts
4.1. Introduction to space coordinates (position and attitude)
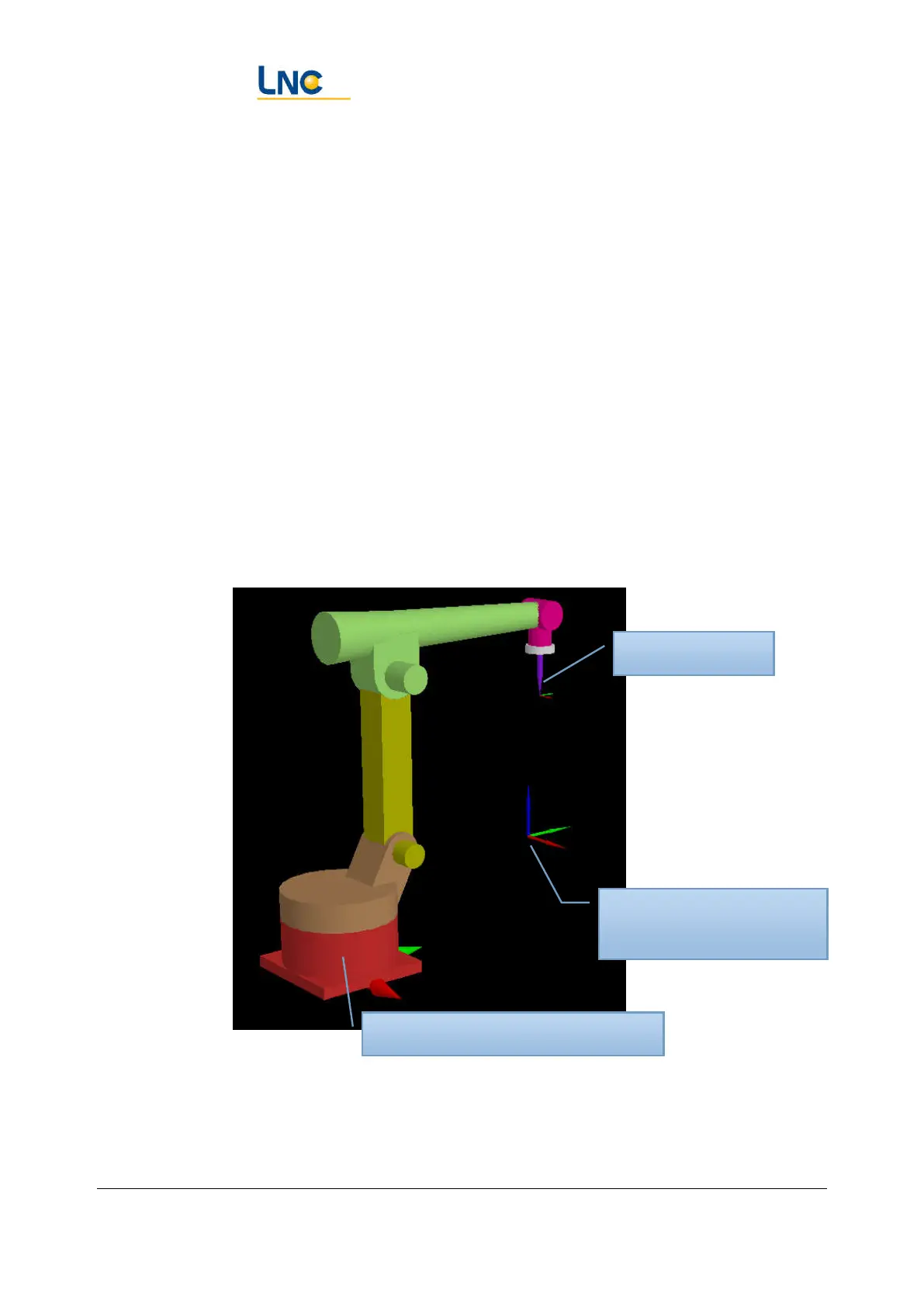
The coordinates of the manipulator generally refer to the position and attitude of the end point.
Refer to the figure below, which is a six-joint manipulator with a schematic diagram of an
additional tool. The following is a description of the coordinates of the LNC joint robot:
Pbase (the origin of world coordinates) is defined in the center of the base. If you think of the
manipulator arm as a person, the direction of the XYZ axis is the same as the direction of our
well-known axis. The right side is +X, the front is +Y, and the above is +Z.
In addition to the position in space, the Ptool also contains the axis representing its attitude.
Pwork is designed to facilitate offline programming and to allow multiple groups of robots to
share the same set of machining programs. It also includes position and attitude axes in space.
World coordinates refer to the spatial position and attitude of Ptool relative to Pbase.
Work coordinates refer to the spatial position and attitude of Ptool relative to Pwork.
Pbase
Ptool
Pwork
X
Y