Joint Robot Manipulator - Software Operation Manual
Advantech LNC Technology Co., Ltd.
30
7. Point record
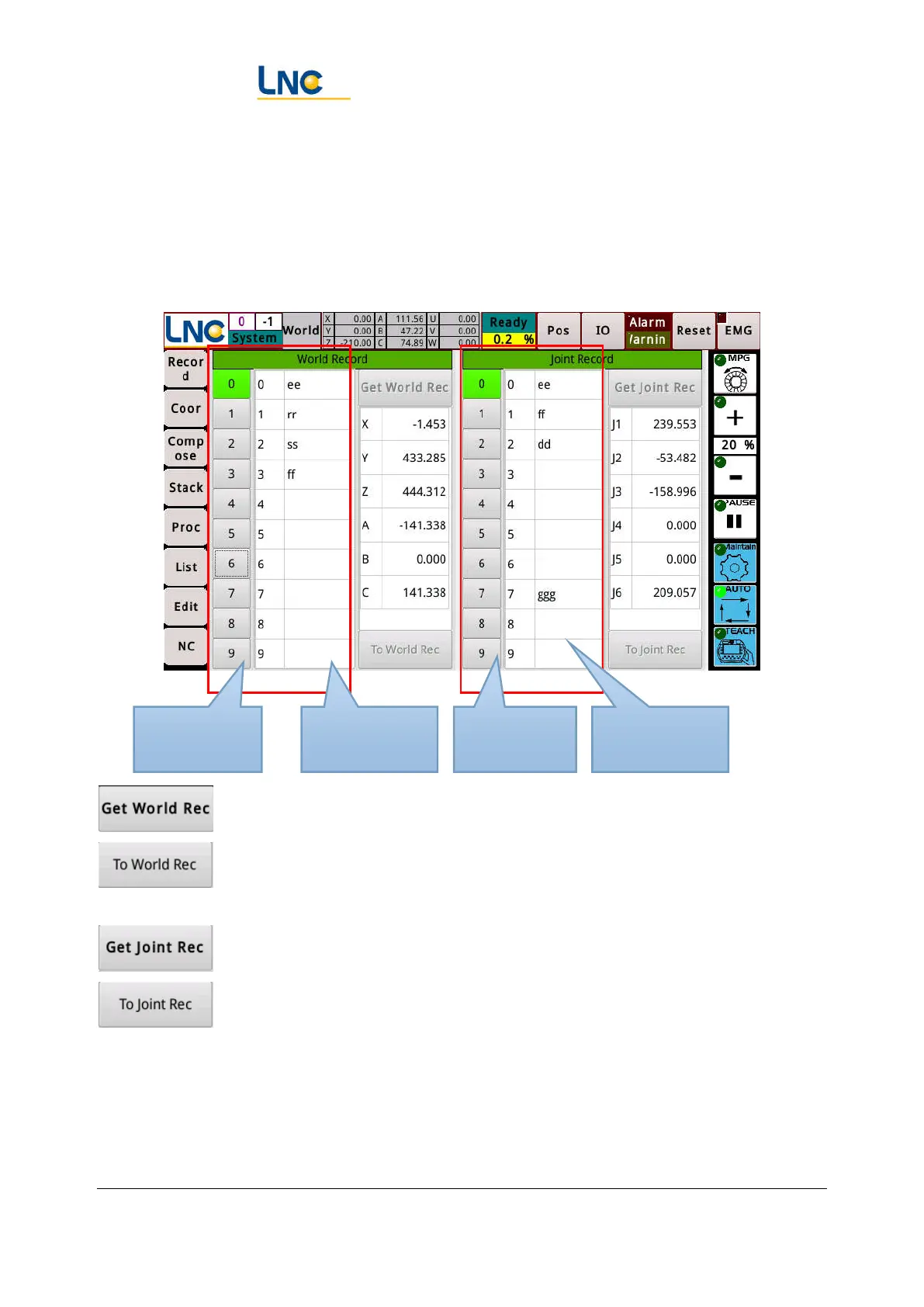
There are two types of point records: world records and joint records.
You can use the "joint record" or "world record" command to program the position that needs to
be different due to installation. It is only necessary to re-calibrate the point record when the
actual site is installed, and it is not necessary to modify the programming content on site.
:Update to the currently selected world record with current world coordinates
:The linear path is calculated according to the current position and the target
position.
:Update to the currently selected joint record with the current joint coordinates.
:Move to the selected joint record position in a fast moving manner.
Note 1: The point record can be used as a coordinate system in addition to the point of operation.
Record number
selection 00~99
Record description
(point number editing)
Record number
selection 00~99
Record description
(point number editing)