Joint Robot Manipulator - Software Operation Manual
Advantech LNC Technology Co., Ltd.
63
13. List
The list page is used to put program files into the list for easy recalling.
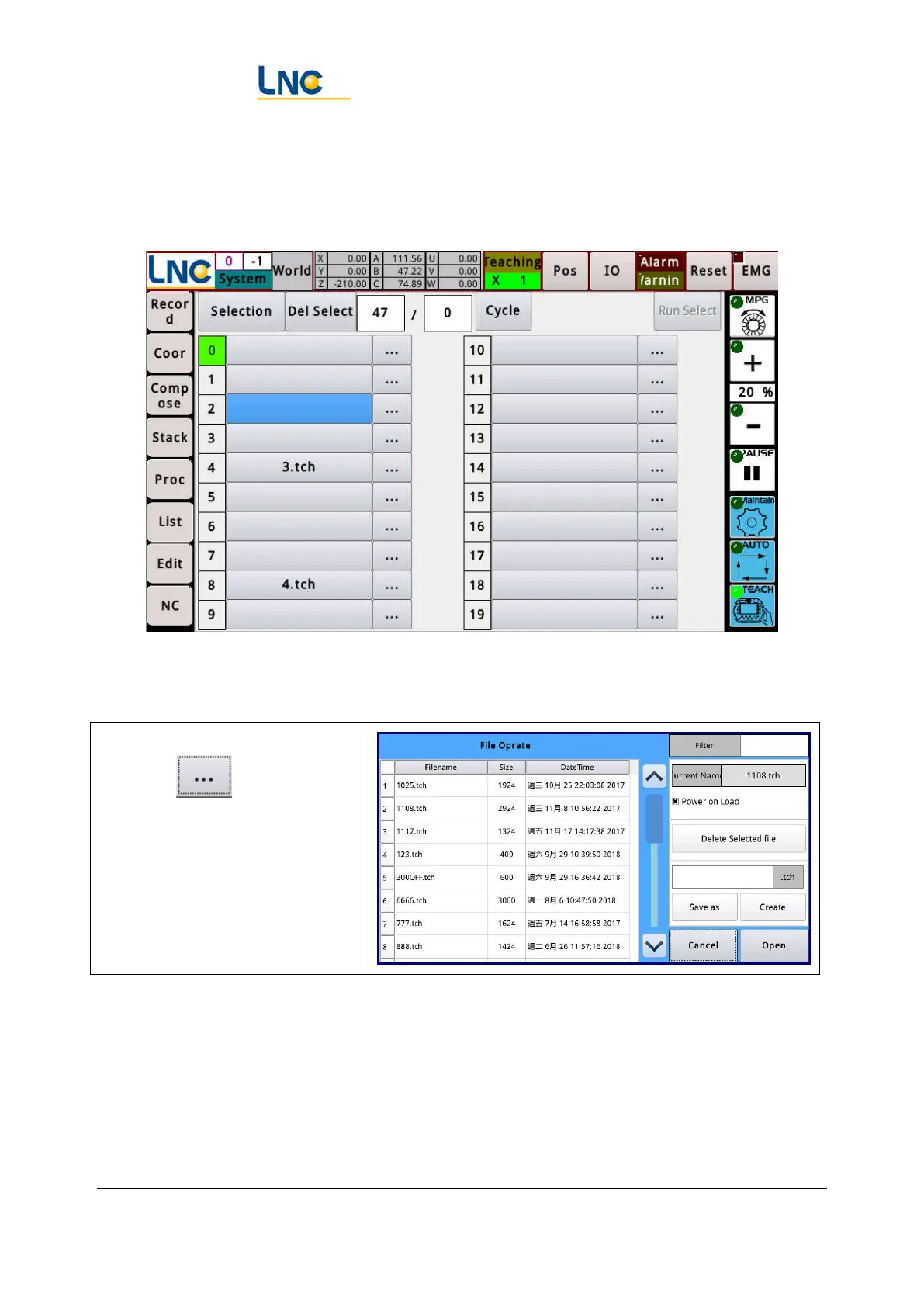
13.1. Put the program into the list
1. Switch to teaching mode.
2. Click .
3. Select the file intended to put
and press Open