Joint Robot Manipulator - Software Operation Manual
Advantech LNC Technology Co., Ltd.
28
6. Tools
The coordinates of the robot represent the spatial position and attitude of Ptool at end, but the
tool is installed after the robot is out of the machine, so there must be parameters to specify the
position and direction of Ptool, which is called the tool parameters.
The system provides four sets of tool parameter settings, each set of parameters contains six
items, where offset X, offset Y, offset Z describes the relative position between the Ptool and the
flange face, angle A, angle B, and angle C describe the direction of the point.
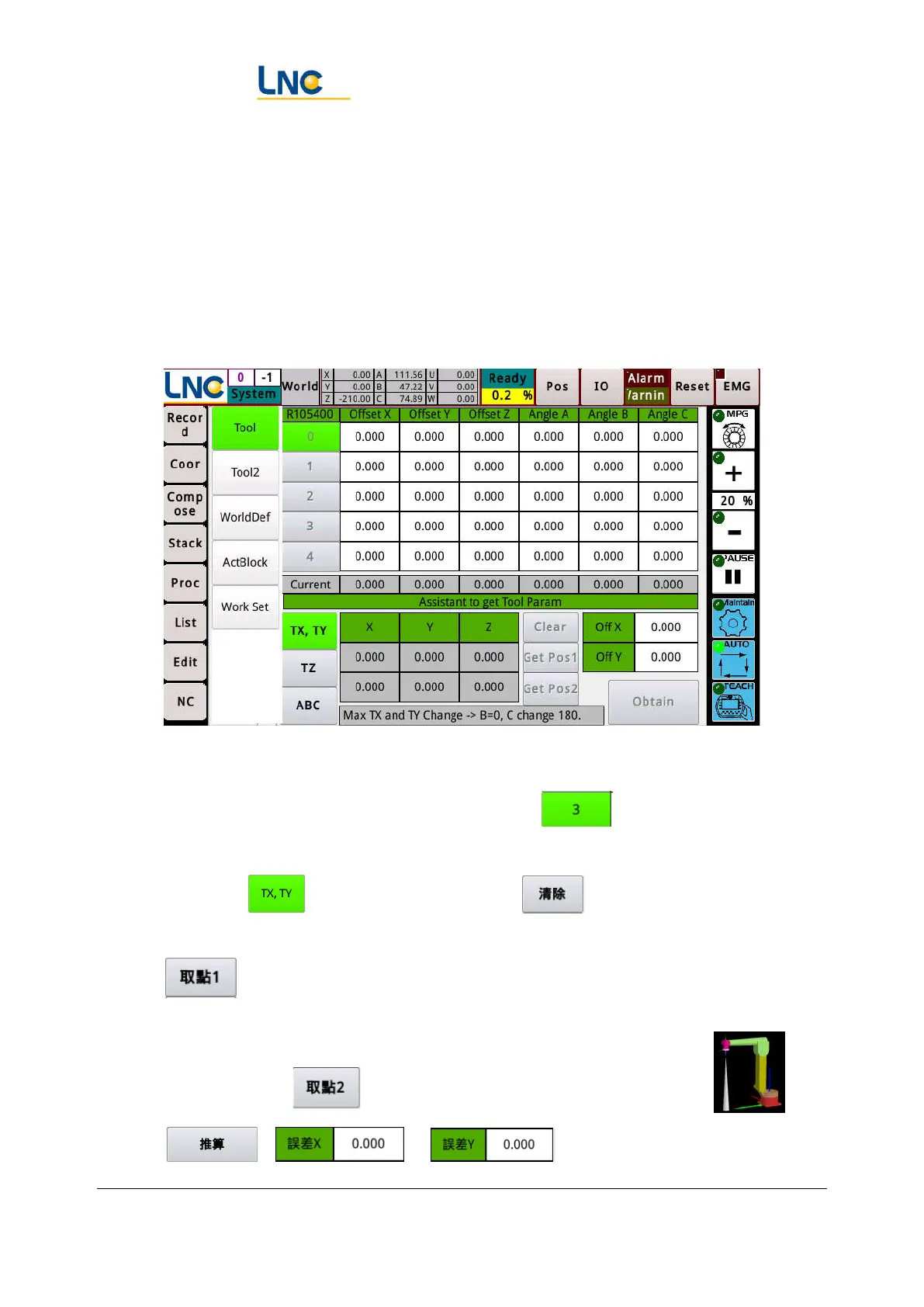
Tool calibration steps
1. Click the tool number 0~3 to be corrected , for example 。
2. Click the item to be corrected and press
3. The robot moves to the attitude of the right figure, while a point is installed externally, and
press after aligned.
4. The external point does not move, the world coordinates rotate C about 90
or 180 degrees, then XYZ moves, so that the Ptool is aligned again with the
external points, press 。
5. Press , and to show the value.