Model 493.02 Controller Service
About Tuning
Tuning
196
Control Mode Characteristics
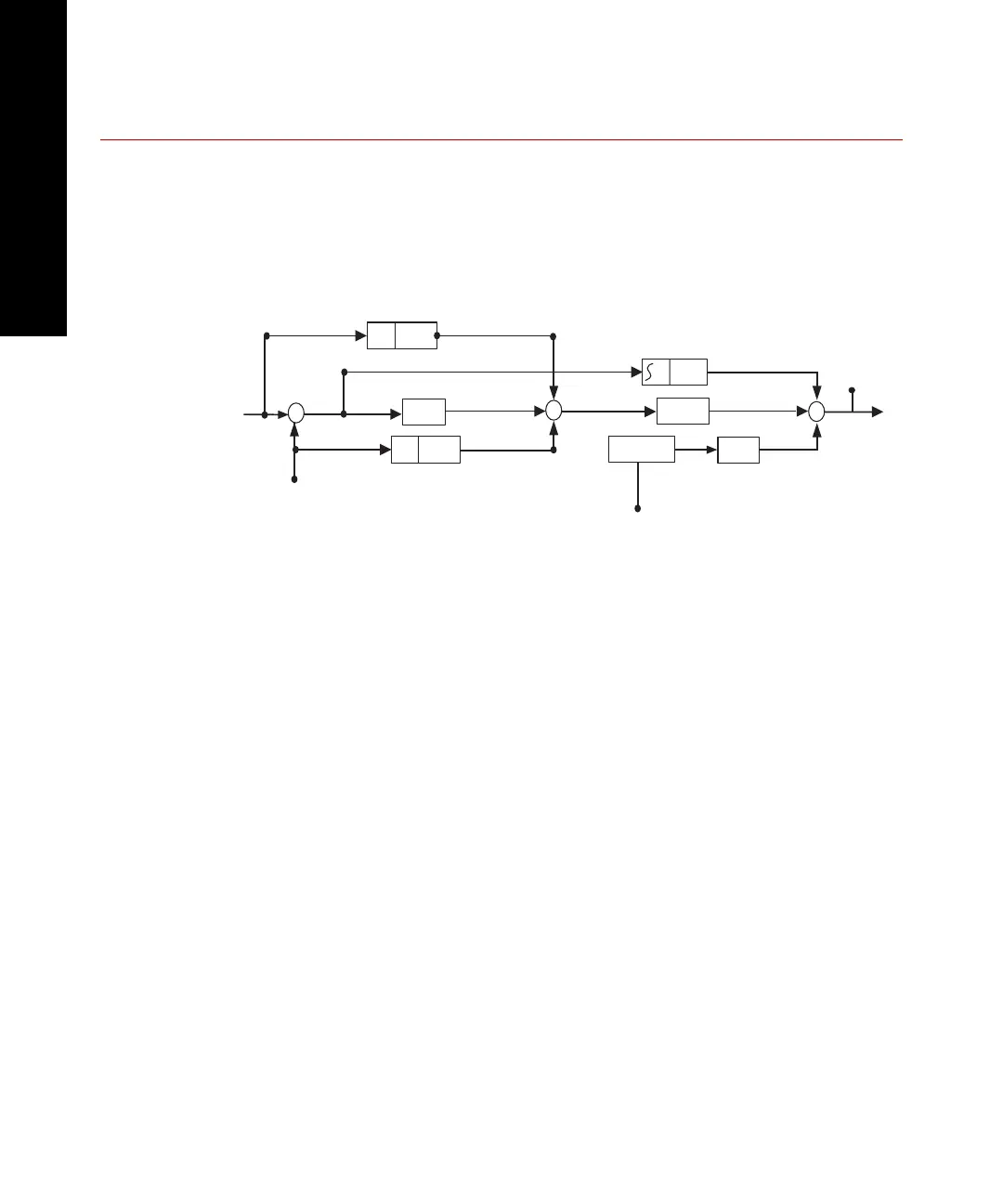
A control mode uses a program command and sensor feedback to
control the servovalve. The controller uses a group of gain controls—
proportional, integral, derivative, and feed forward gain. These
controls are called PIDF. The PIDF controller can also incorporate
stabilization gain and an adjustable forward loop filter.
Each control mode has different tuning characteristics. This section
describes the characteristics of the following control modes:
• Displacement control
• Force control
• Strain control
• CLC control
• Dual Compensation control
Active
Feedback
Stabilization
Feedback
Valve
Driver
Compensated
Command
FL Filter
1
-
-
-
Stab Filter
2
P Gain
F Gaind/dt
+
D Gaind/dt
I Gaindt
S Gain
1 FL Filter on the Tuning Menu
Sets filter frequency and select filter type.
2 Stabilization Filter on the Tuning Menu
Sets filter frequency and select filter type.
 Loading...
Loading...