About Tuning
Model 493.02 Controller Service
Tuning
203
Feed forward gain (F) Feed forward gain is like derivative gain except that it introduces a
derivative of the command signal. It anticipates how much valve
opening is needed to reach the required response and adds that to the
valve command—like compensating for phase lag.
Feed forward gain:
• Does not compensate for normal changes during testing (such as
temperature changes, servovalve droop, and so forth).
• May be used to minimize phase lag.
• Should be used in a way similar to derivative gain. However, it is
applied to the test command signal instead of the feedback signal.
Feed forward gain helps the servo-control loop react quickly to an
abrupt change in the command.
• Is needed when testing a soft specimen in force control.
Stabilization
gain (S)
Stabilization gain allows a second signal to be integrated into the
composite command signal as a stabilizing factor. It enhances stability
for systems that move large masses at high speeds. The second signal
is generated by a special transducer such as
∆P (differential pressure)
or accelerometer.
Stabilization controls will be available only if a stabilization resource
was added to the control channel in the Station Builder program.
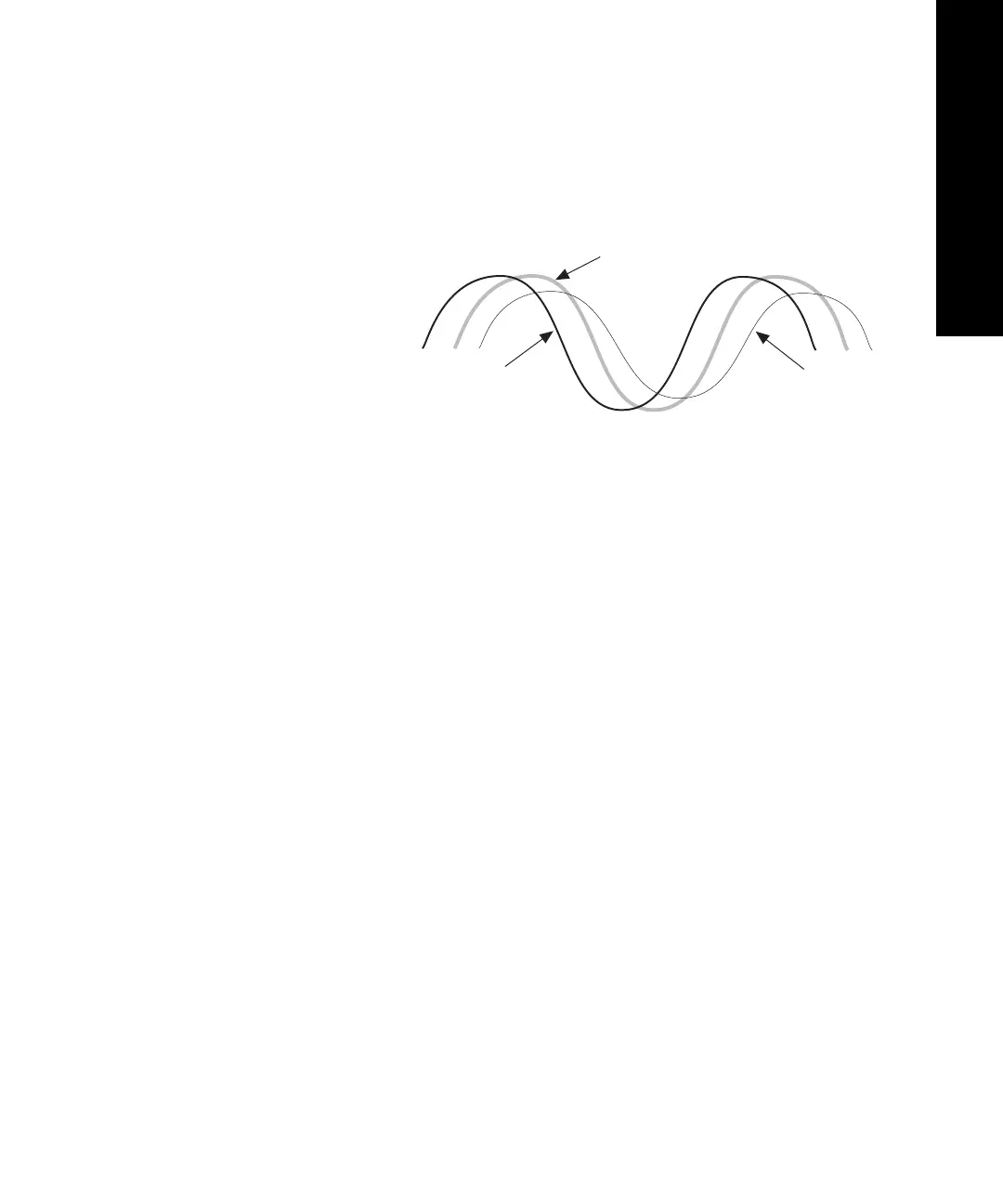
Feed Forward Command
Original Command
Original Feedback
Adjusting feed forward causes
the command to begin sooner
so the feedback may track the
original command more
closely
 Loading...
Loading...