530
Double-precision Floating-point Instructions Section 3-15
Comparison of the Calculation Results
When the real-number results are compared, it is clear that the double-preci-
sion calculation yields a more accurate result.
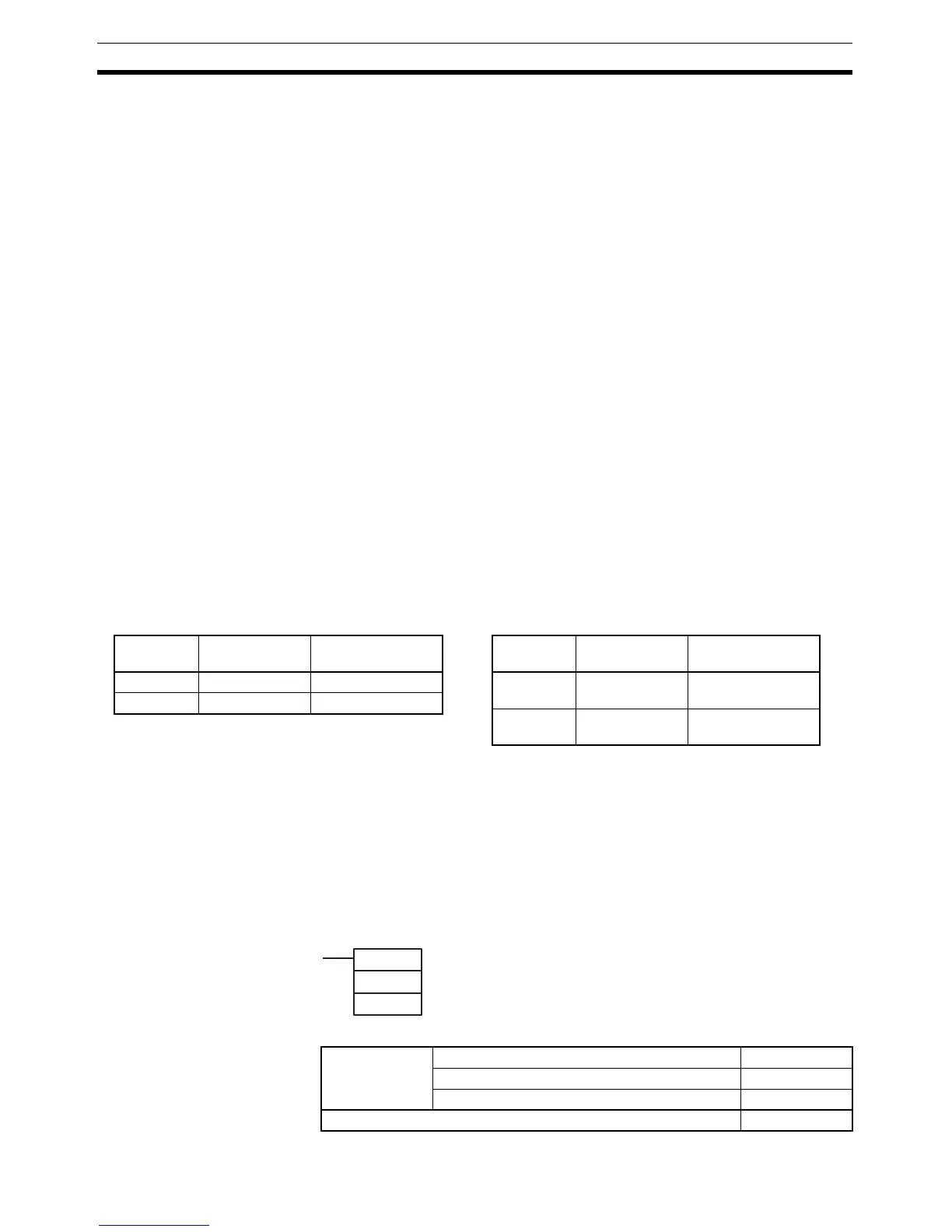
3-15-1 DOUBLE FLOATING TO 16-BIT: FIXD(841)
Purpose Converts a double-precision (64-bit) floating-point value to 16-bit signed
binary data and places the result in the specified result word.
Ladder Symbol
Variations
1. This program section converts the BCD data
to single-precision floating-point data (32 bits,
IEEE754-format).
a. The BIN(023) instructions convert the
BCD data to binary and the FLT(452) in-
structions convert the binary data to sin-
gle-precision floating-point data.
b. The floating-point data for the angle
θ is
output to D200 and D201.
c. RAD(458) converts the angle data in
D200 and D201 to radians.
d. The floating-point data for the radius r is
output to D1200 and D1201.
2. This program section calculates the sin
θ and
the cos
θ as single-precision floating-point val-
ues.
a. The value for cos
θ is output to D300 and
D301.
b. The value for sin
θ is output to D400 and
D401.
3. This program section calculates x (r
× cos θ)
and y (r
× sin θ).
a. The value for x (r
× cos θ) is output to
D10000 and D10001.
b. The value for y (r
× sin θ) is output to
D20000 and D20001.
Coordinate Floating-point
number
Real number
x 4116 59CF 3.4202015399933
y 405A E495 9.3969259262085
1. This program section converts the BCD data
to double-precision floating-point data (64
bits, IEEE754-format).
a. The BIN(023) instructions convert the
BCD data to binary and the DBL(843) in-
structions convert the binary data to dou-
ble-precision floating-point data.
b. The floating-point data for the angle
θ is
output to words D200 to D203.
c. RADD(849) converts the angle data in
words D200 to D203 to radians.
d. The floating-point data for the radius r is
output to words D1200 to D1203.
2. This program section calculates the sin
θ and
the cos
θ as double-precision floating-point
values.
a. The value for cos
θ is output to words
D300 to D303.
b. The value for sin
θ is output to words D400
and D403.
3. This program section calculates x (r
× cos θ)
and y (r
× sin θ).
a. The value for x (r
× cos θ) is output to
words D10000 to D10003.
b. The value for y (r
× sin θ) is output to
D20000 and D20003.
Coordinate Floating-point
number
Real number
x 4022 CB39
E973 5C32
3.4202014332567
y 400B 5C92
91AC 8EEB
9.3969262078591
FIXD(841)
S
D
S: First source word
D: Destination word
Variations Executed Each Cycle for ON Condition FIXD(841)
Executed Once for Upward Differentiation @FIXD(841)
Executed Once for Downward Differentiation Not supported.
Immediate Refreshing Specification Not supported.