627
Data Control Instructions Section 3-17
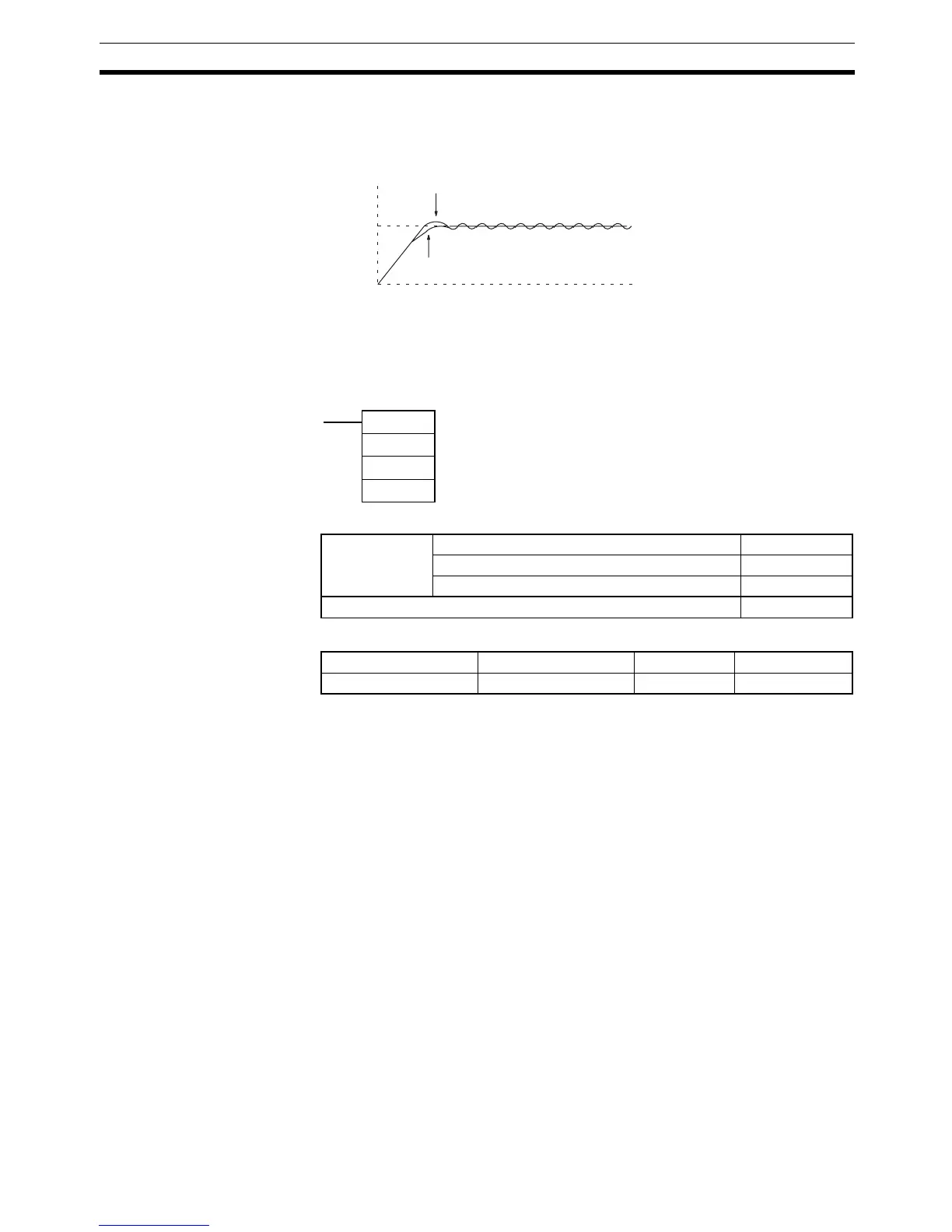
• If the period is short and hunting occurs, it may be that the control system
response is quick and the derivative action is too strong. In that case, set
the derivative action lower.
3-17-2 PID CONTROL WITH AUTOTUNING: PIDAT(191)
Purpose Executes PID control according to the specified parameters. The PID con-
stants can be autotuned.
Ladder Symbol
Variations
Applicable Program Areas
Parameters The following diagrams show the locations of the parameter data. For details
on the parameters, refer to PID Parameter Settings in this section.
SV
Control by measured PID
(when hunting occurs in a short period)
Lower D
PIDAT(191)
S
C
D
S: Input word
C: First parameter word
D: Output word
Variations Executed Each Cycle for ON Condition PIDAT(191)
Executed Once for Upward Differentiation Not supported.
Executed Once for Downward Differentiation Not supported.
Immediate Refreshing Specification Not supported.
Block program areas Step program areas Subroutines Interrupt tasks
Not allowed OK OK Not allowed