631
Data Control Instructions Section 3-17
The timing of enabling changes made to PID constants can be set to either 1)
the beginning of PIDAT(191) instruction execution or 2) the beginning of PID
instruction execution and each sampling period. Only the proportional band
(P), integral constant (Tik), and derivative constant (Tdk) can be changed
each sampling cycle (i.e., during PID instruction execution). The timing is set
in bit 1 of C+5.
When changing the PID constants manually, set the PID constant change
enable setting (bit 1 of C+5) to 1 so that the values in C+1, C+2, and C+3 are
refreshed each sampling period in the PID calculation. This setting also allows
the PID constants to be adjusted manually after autotuning.
Of the PID parameters (C to C+40), only the following parameters can be
changed when the execution condition is ON. When any other values have
been changed, be sure to change the execution condition from OFF to ON to
enable the new settings.
• Set value (SV) in C
(Can be changed during PID control only. An SV change during autotun-
ing will not be reflected.)
• PID constant change enable setting (bit 1 of C+5)
• P, I, and D constants in C+1, C+2, and C+3
(Changes to these constants will be reflected each sampling period only if
the PID constant change enable setting (bit 1 of C+5) is set to 1.)
• AT Command Bit (bit 15 of C+9)
• AT Calculation Gain (bits 0 to 14 of C+9) and Limit-cycle Hysteresis
(C+10) (These values are read when autotuning starts.)
Note The PIDAT(191) instruction is the same as the PID(190) instruction with the
added autotuning (AT) function, so the PID control operations are identical.
Refer to 3-17-1 PID CONTROL: PID(190) for details on PID control operations
and examples.
Flags
Precautions PIDAT(191) is executed as if the execution condition was a STOP-RUN signal.
PID calculations are executed when the execution condition remains ON for
the next cycle after C+11 to C+40 are initialized. Therefore, when using the
Always ON Flag (ON) as an execution condition for PIDAT(191), provide a
separate process where C+11 to C+40 are initialized when operation is
started.
If the C data is out of range, an error will occur and the Error Flag will turn ON.
If an error occurred during autotuning, the Error Flag will turn ON.
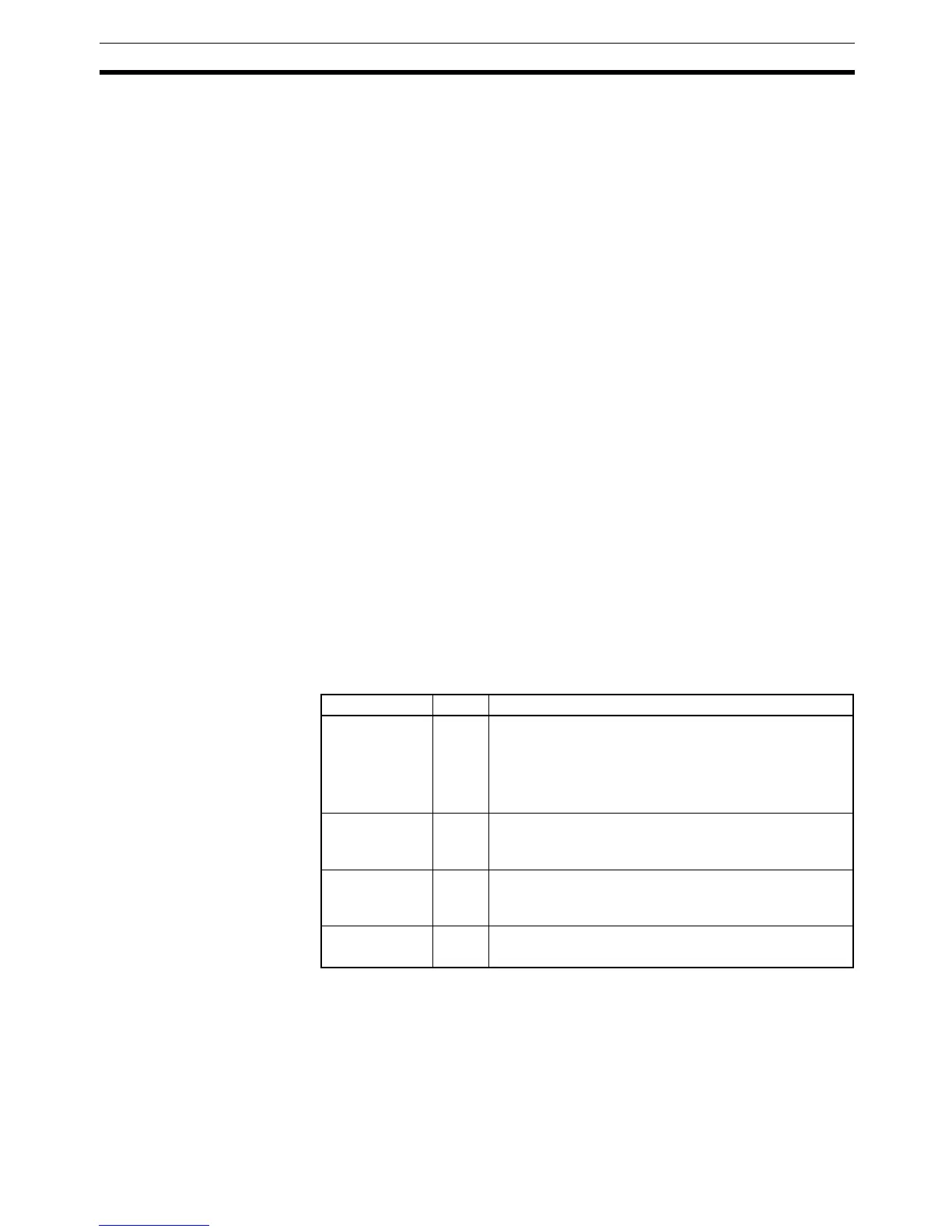
Name Label Operation
Error Flag ER ON if the C data is out of range.
ON if the actual sampling period is more than twice the
designated sampling period.
ON if an error occurred during autotuning.
OFF in all other cases.
Greater Than
Flag
> ON if the manipulated variable after the PID action
exceeds the upper limit.
OFF in all other cases.
Less Than Flag < ON if the manipulated variable after the PID action is
below the lower limit.
OFF in all other cases.
Carry Flag CY ON while PID control is being executed.
OFF in all other cases.