723
High-speed Counter/Pulse Output Instructions Section 3-20
3-20-5 SPEED OUTPUT: SPED(885)
Purpose SPED(885) is used to set the output pulse frequency for a specific port and
start pulse output without acceleration or deceleration. Either independent
mode positioning or continuous mode speed control is possible. For indepen-
dent mode positioning, the number of pulses is set using PULS(886).
SPED(885) can also be executed during pulse output to change the output
frequency, creating stepwise changes in the speed.
Ladder Symbol
Variations
Applicable Program Areas
Operands P: Port Specifier
The port specifier specifies the port where the pulses will be output.
M: Output Mode
The value of M determines the output mode.
@CTBL
#0000
#0000
D100
0002
01F4
0000
0001
03E8
0000
0002
0.00
D100
D101
D102
D103
D104
D105
D106
Two target values
Target value 1: 0000 01F4 hex (500)
Incrementing, Interrupt task number 1
Target value 2: 0000 03E8 hex (1000)
Incrementing, Interrupt task number 2
Register target comparison table
and start comparison
High-speed counter input 0
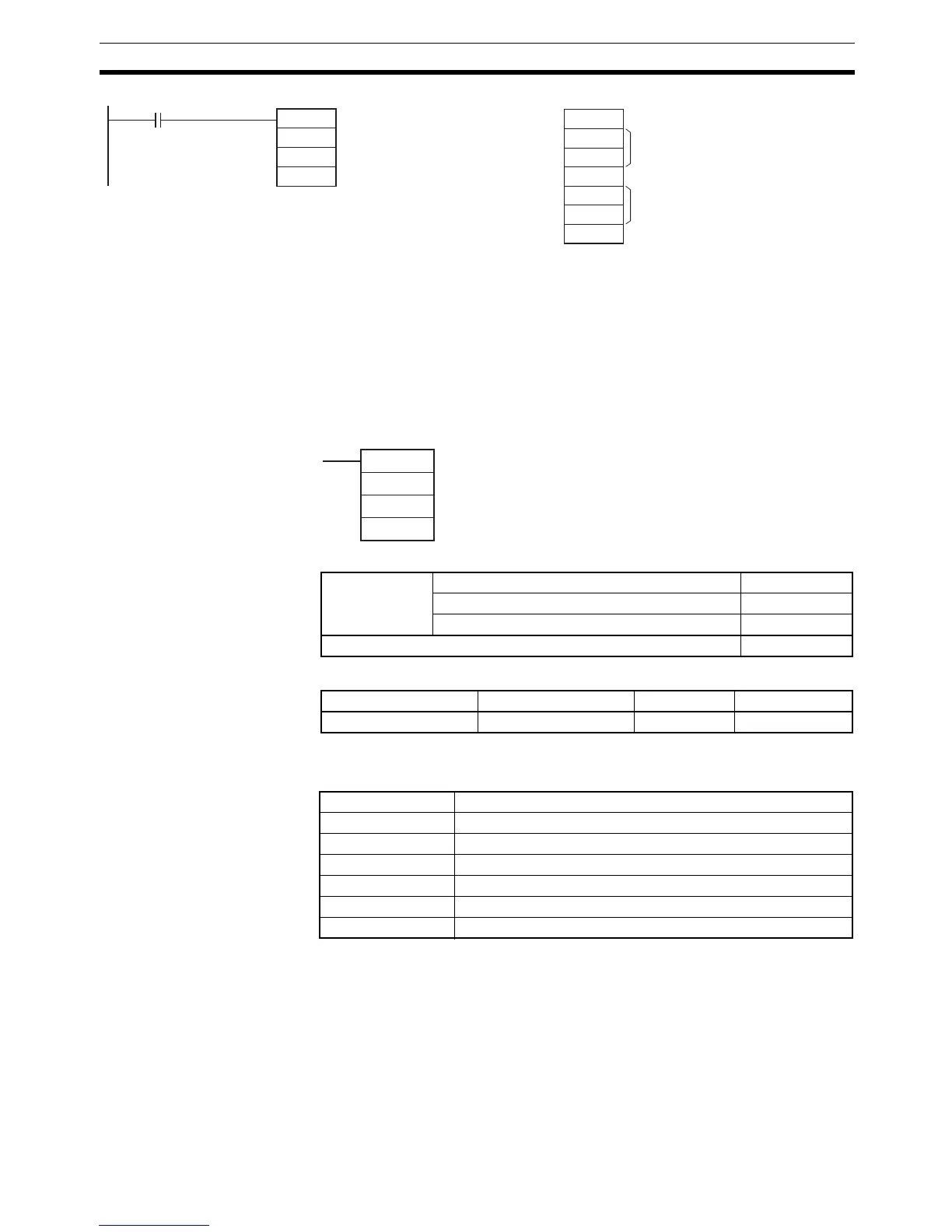
SPED(885)
P
M
F
P: Port specifier
M: Output mode
F: First pulse frequency word
Variations Executed Each Cycle for ON Condition SPED(885)
Executed Once for Upward Differentiation @SPED(885)
Executed Once for Downward Differentiation Not supported
Immediate Refreshing Specification Not supported
Block program areas Step program areas Subroutines Interrupt tasks
OK OK OK OK
PPort
0000 hex Pulse output 0
0001 hex Pulse output 1
0002 hex Pulse output 2 (CP1H only)
0003 hex Pulse output 3 (CP1H only)
0020 hex Inverter positioning 0 (CP1L only)
0021 hex Inverter positioning 1 (CP1L only)