Noise Width
Set the width for judging noise.
• When no color is specified:
If another edge is detected within the width range starting from the point where an edge was first
detected, the newly detected point is considered noise.
• When a color is specified:
If the color difference distributions again falls below the edge level within the width range starting
from the point where an edge was first detected, the newly detected point is considered noise.
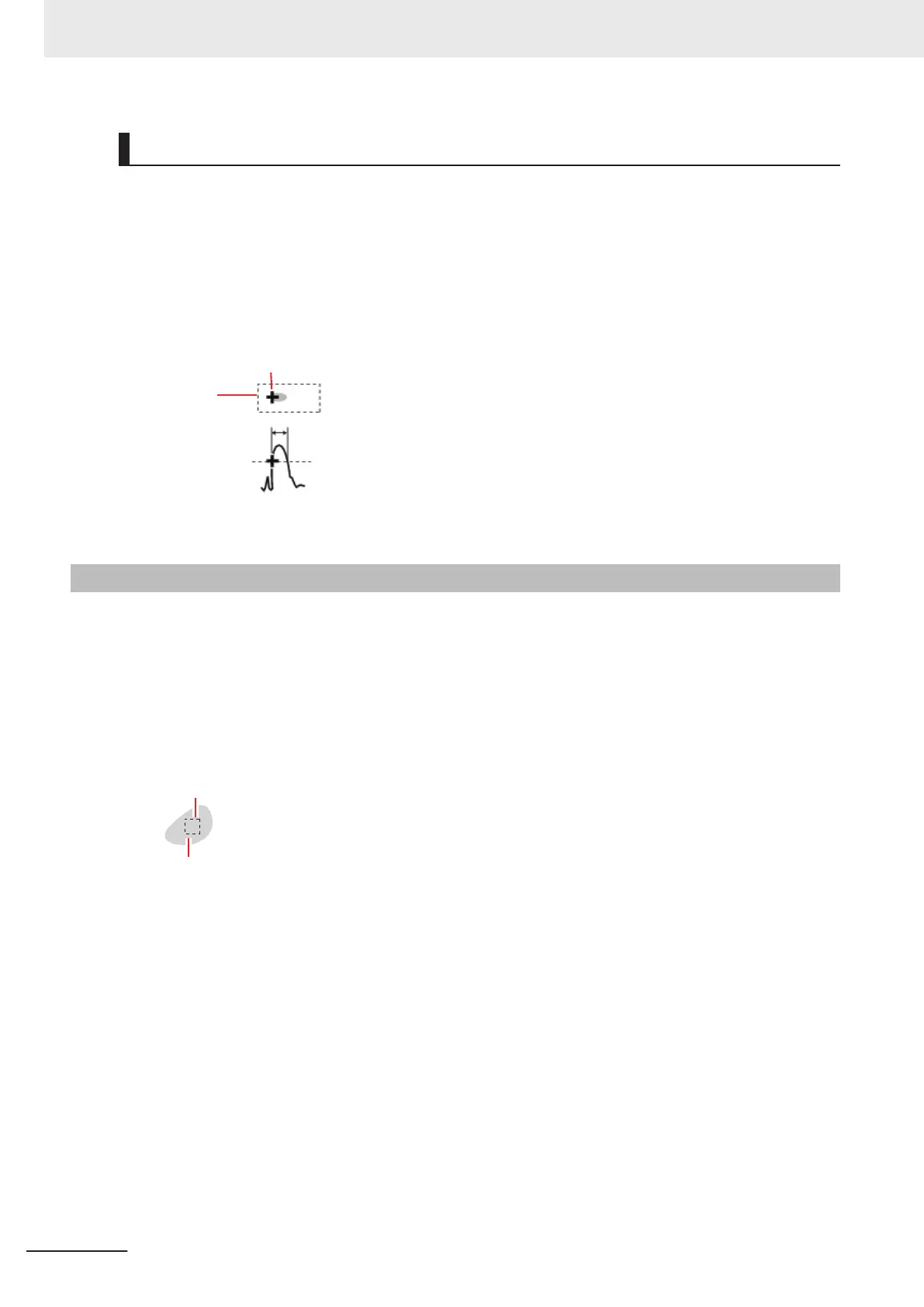
Edge detection point
Measurement
region
If the value is below the edge level within the
specified width, it is considered as noise.
Noise width (pixels)
Edge level50%
When points are mistakenly detected as edges due to noise, increase the color difference value.
A-5-4
Defect Detection Measurement
Color changes within the measurement region are used to find defects such as scratches,contamina-
tion, and chipping.
After measurement region is drawn, a rectangle (defect detection region) is automatically formed in
this region. While moving the defect detection region around, calculate average density for each area
to determine the difference between the original area and the surrounding area. This difference is
called the defect level. Calculate the defect level for all defect detection areas. If the maximum value
exceeds the judgement value, it is judged that there are defects in the measurement region.
Defect detection size
Defect
Increasing Defect size allows for shortening of processing time, but this will reduce measurement ac-
curacy.
Appendices
A - 18
FH/FHV Series Vision System User’s Manual (Z365-E1)
 Loading...
Loading...


