2 Instruction Descriptions
2-404
NJ-series Instructions Reference Manual (W502)
You must use suitable PID constants to execute this instruction. There are the following two ways to
achieve this.
z When Suitable PID Constants Are Not Known
Perform autotuning at the start of operation to find suitable PID constants. Change the value of Run
to TRUE while the value of StartAT is TRUE. First, autotuning is executed, and then PID control is
started with the PID constants that are found.
z When Suitable PID Constants Are Known
Set suitable PID constants in ProportinalBand, IntegrationTime, and DerivativeTime, and then
change Run to TRUE. ProportinalBand, IntegrationTime, and DerivativeTime are in-out variables.
You cannot set constants for the input parameters. Always define suitable variables, and then assign
the values to input parameters.
You can change the PID constants during operation. You can also perform autotuning during opera-
tion. To start autotuning during operation, change the value of StartAT to TRUE.
Manipulated variable MV is determined according to the control status as shown in the following table.
Starting PID Control
Control Status and Manipulated Variable
Control status
Value of variable
Manipulated vari-
able MV
ManCtl
(man-
ual/auto
control)
Run (exe-
cution con-
dition)
Error (error
end)
Man-
TrackSw
(manual
tracking
switch)
ATBusy
(autotun-
ing busy)
Error end
FALSE
TRUE
TRUE
---
FALSE
ErrorMV (error MV)
MV tracking dur-
ing automatic
operation
FALSE
TRUE MVTrackVal (MV
tracking value)
Autotuning dur-
ing automatic
operation
FALSE TRUE Value repeatedly
changes between
upper limit of MV
and lower limit of
MV.
Not autotuning
during automatic
operation
FALSE Value calculated
with current PID
constants.
Instruction exe-
cution stopped
FALSE ---
---
StopMV (Stop MV)
Manual opera-
tion
TRUE --- ManMV (manual
manipulated vari-
able)
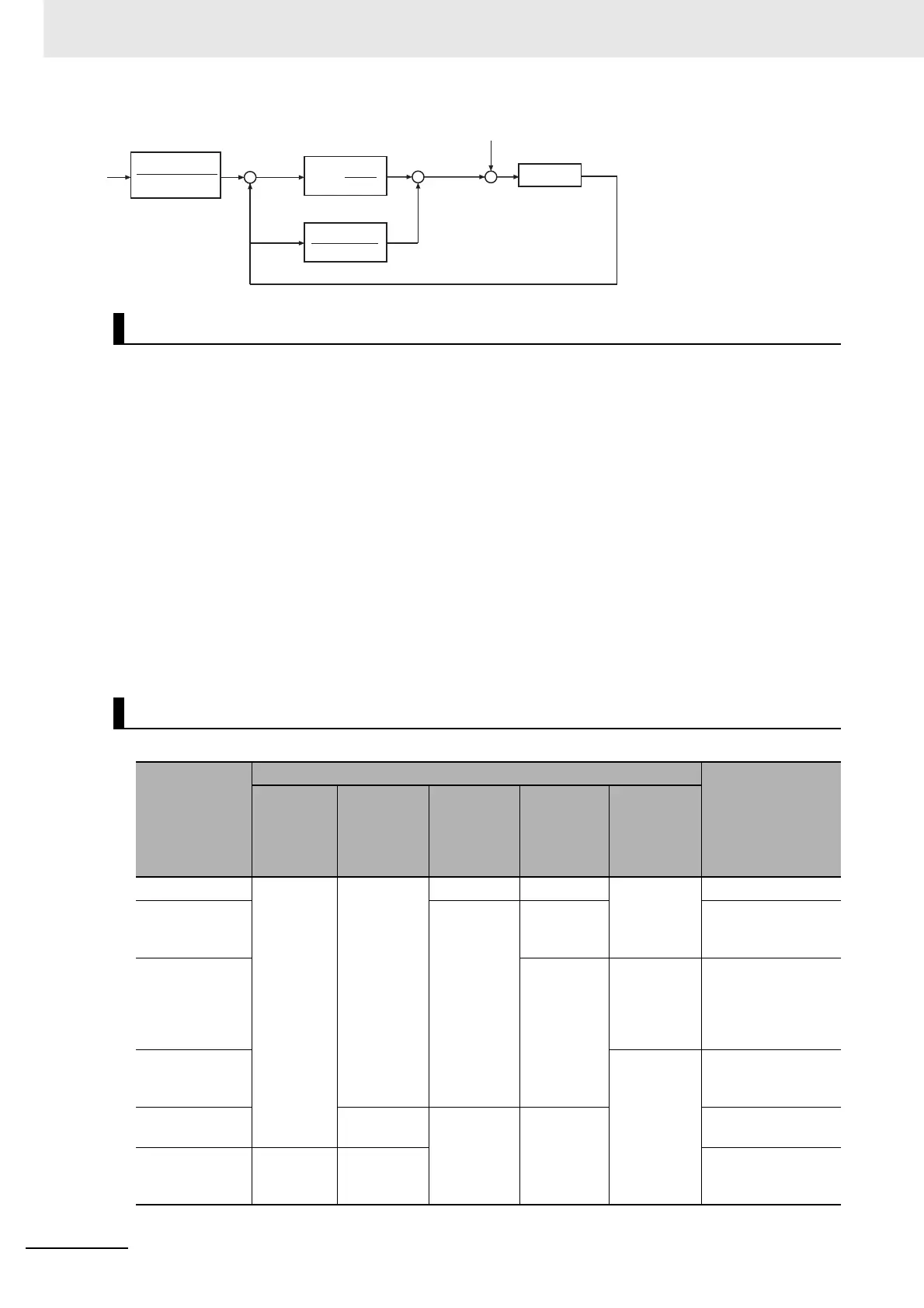
Set
point
Deviation
Manipulated
variable
Process value
Controlled
system
Set point filter
Disturbance
Proportional +
integral components
Advanced derivative
component
+
+
+
+
−
−
Kp: Proportional constant
Ti: Integration time
Td: Derivative time
s: Laplace operator
α: 2-PID parameter
λ: Incomplete derivative coefficient
1 + (1−α)Ti ⋅ s
1 + Ti ⋅ s
Kp ⋅ Td ⋅ s
1 + λ ⋅ Td ⋅ s
Kp +
Kp
Ti ⋅ s

 Loading...
Loading...



