5 Motion Control Parameters
5-6
NJ/NX-series CPU Unit Motion Control User’s Manual (W507)
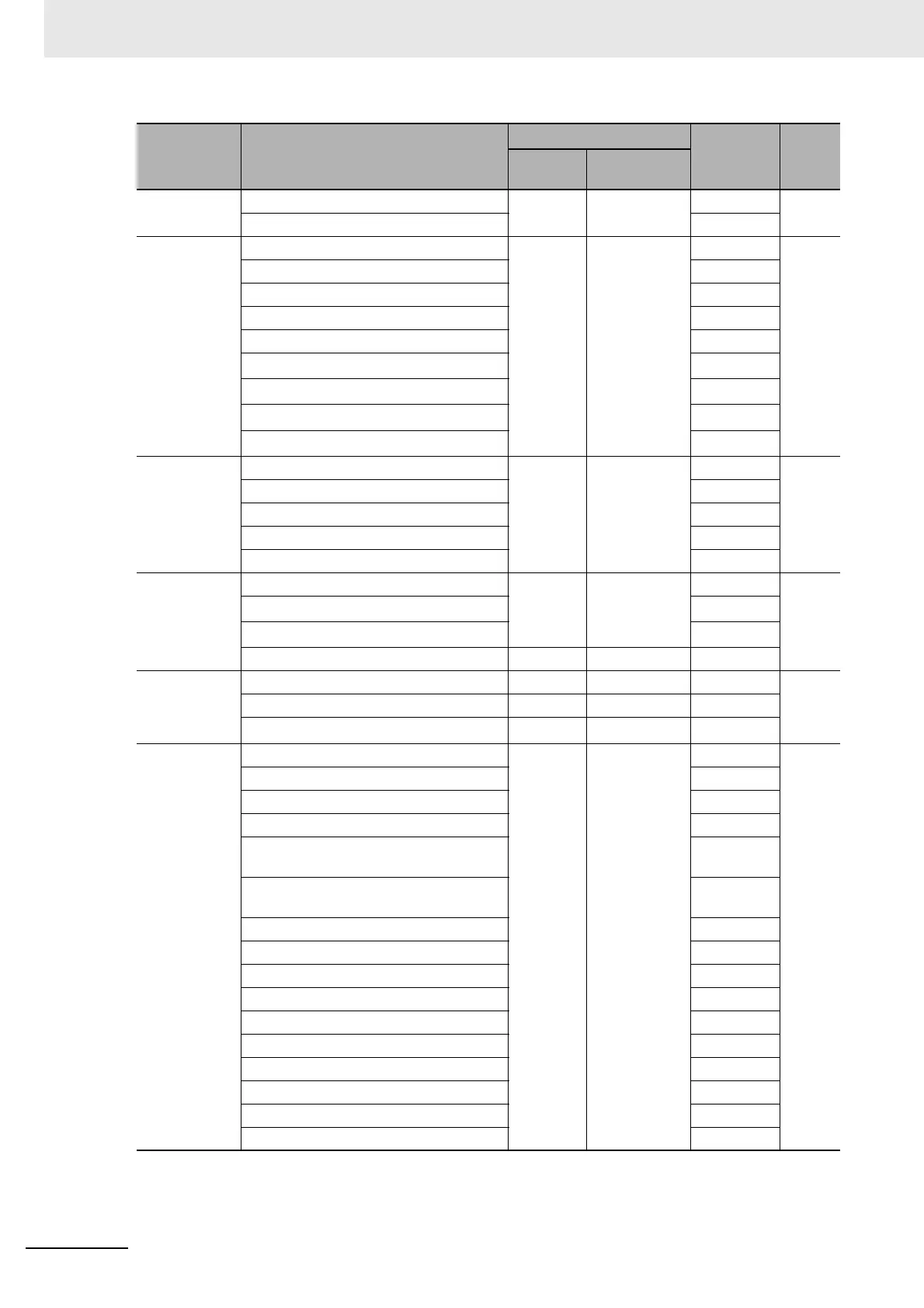
*1 This column indicates if you can use instructions to temporarily change the settings.
*2 Indicates whether you can access the parameter with a system-defined variable for motion control in the user
program.
Operation Set-
tings
Actual Velocity Filter Time Constant
OK
*7
MC_WriteAx-
isParameter
*8
--- P. 5-20
Zero Position Range ---
Other Opera-
tion Settings
Immediate Stop Input Stop Method
OK
*7
MC_WriteAx-
isParameter
*8
--- P. 5-24
Limit Input Stop Method ---
Drive Error Reset Monitoring Time ---
Maximum Positive Torque Limit ---
Maximum Negative Torque Limit ---
Immediate Stop Input Logic Inversion
*10
---
Positive Limit Input Logic Inversion
*10
---
Negative Limit Input Logic Inversion
*10
---
Home Proximity Input Logic Inversion
*10
---
Limit Settings Software Limits OK MC_Write
MC_WriteAx-
isParameter
*8
--- P. 5-25
Positive Software Limit ---
Negative Software Limit ---
Following Error Over Value ---
Following Error Warning Value ---
Position Count
Settings
Count Mode
OK
*7
MC_WriteAx-
isParameter
*8
--- P. 5-25
Modulo Maximum Position Setting Value
OK
*4
Modulo Minimum Position Setting Value
OK
*4
Encoder Type --- --- ---
Servo Drive
Settings
Modulo Maximum Position Setting Value --- --- --- P. 5-27
Modulo Minimum Position Setting Value --- --- ---
PDS State Control Method
*4
--- --- ---
Homing Set-
tings
Homing Method
OK
*7
MC_WriteAx-
isParameter
*8
--- P. 5-28
Home Input Signal ---
Homing Start Direction ---
Home Input Detection Direction ---
Operation Selection at Positive Limit
Input
---
Operation Selection at Negative Limit
Input
---
Homing Velocity ---
Homing Approach Velocity ---
Homing Acceleration ---
Homing Deceleration ---
Homing Jerk ---
Home Input Mask Distance ---
Home Offset ---
Homing Holding Time ---
Homing Compensation Value ---
Homing Compensation Velocity ---
Classification Parameter name
Temporary changes
*1
Reading
variables
*2
Page
Support
Applicable
instruction

 Loading...
Loading...







