8 Homing
8-14
NJ/NX-series CPU Unit Motion Control User’s Manual (W507)
8-4 Homing with an Absolute Encoder
This section describes how to use an OMRON 1S-series Servomotor/Servo Drive with built-in Ether-
CAT communications.
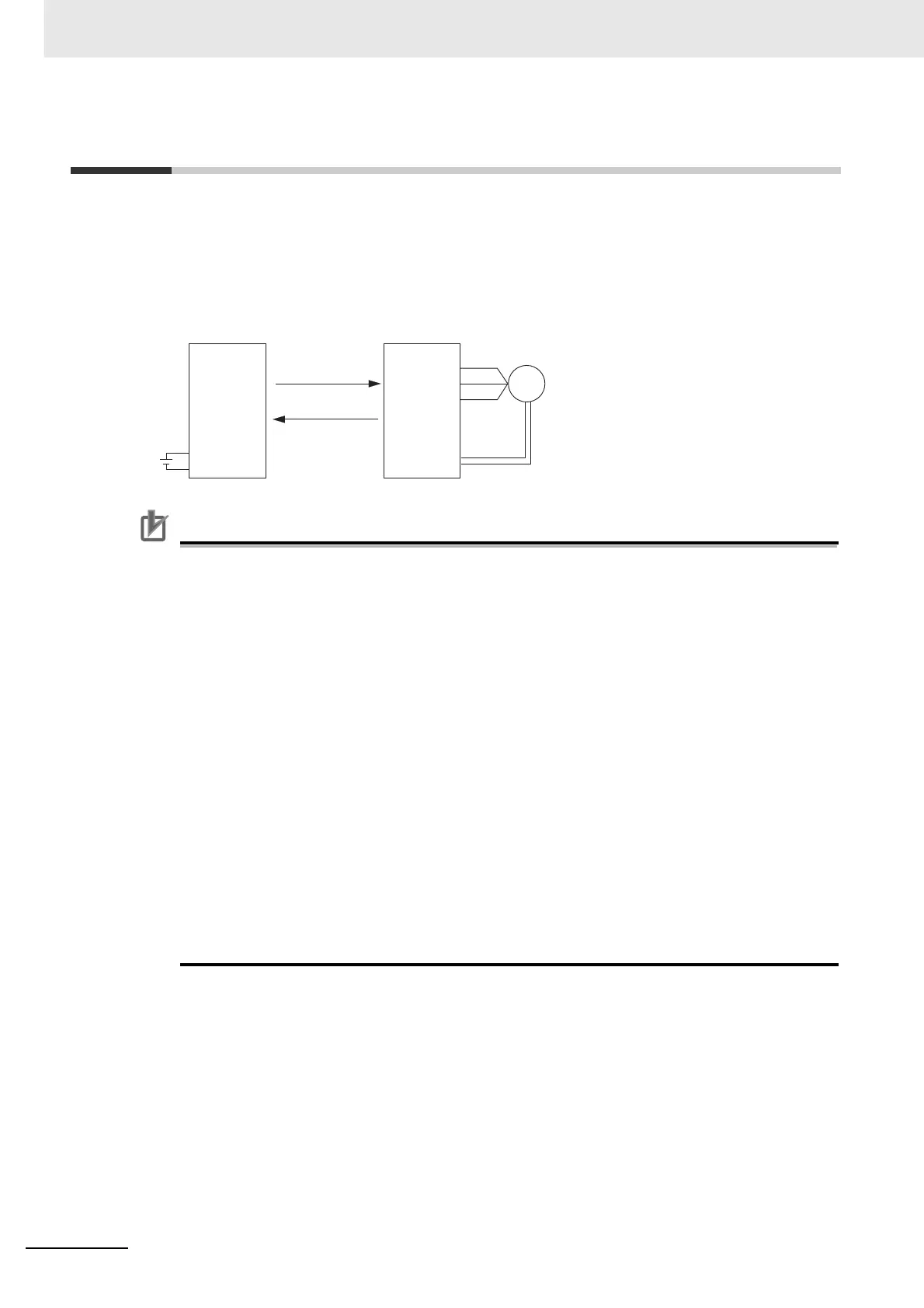
If you use an absolute encoder, the absolute data can be retained even when the power supply to the
CPU Unit is turned OFF. When you execute the MC_Power (Power Servo) instruction, the position is
determined by reading the actual position from the absolute encoder. Unlike when using an incremental
encoder, after home is defined, you do not need to perform the homing operation again.
Precautions for Correct UsePrecautions for Correct Use
• If you use an OMRON 1S-series Servo Drive, connect a battery to the CPU Unit.
• If you use an absolute encoder of an OMRON G5-series Servo Drive, connect a battery to the
CPU Unit and an absolute encoder backup battery to the Servo Drive.
• Always execute the MC_Home or MC_HomeWithParameter instruction to define home when
you use the absolute encoder for the first time, after you replace the motor, when you use an
OMRON G5-series Servo Drive, when the battery in the absolute encoder expires, or at any
other time when the absolute value data is lost. After you complete these steps, home is
defined when the Enable input variable to the MC_Power instruction changes to TRUE. For a
CPU Unit with unit version 1.10 or later, home is also defined when EtherCAT process data
communications change from a non-established to an established state, in addition to the pre-
viously mentioned step.
• If there is an error for the Battery in the CPU Unit when the power supply to the Controller is
turned ON, an Absolute Encoder Home Offset Read Error (event code:14600000 hex) occurs.
You can use the ResetMCError instruction to reset the error and turn ON the Servo.
For a CPU Unit with unit version 1.09 or earlier, when the error is reset and the Servo is turned
ON, home is defined with an absolute encoder home offset value of 0.
For a CPU Unit with unit version 1.10 or later, home will be left undefined until it is defined by
the MC_Home or MC_HomeWithParameter instruction executed after error reset.
In order to operate with correct positions, execute the MC_Home or MC_HomeWithParameter
instruction to define the correct home position. If the power supply to the Controller is turned
OFF, home will become undefined.
Battery-free backup
Motor (absolute encoder)
Servo Drive
Absolute data
MC_Power executed.
CPU Unit
M
Battery

 Loading...
Loading...







