9-27
9 Motion Control Functions
NJ/NX-series CPU Unit Motion Control User’s Manual (W507)
9-2 Single-axis Synchronized Control
9
9-2-10 Achieving Synchronized Control in Multi-motion
For details on slave axis position compensation, refer to the MC_SyncOffsetPosition (Cyclic Synchro-
nous Position Offset Compensation) instruction in the NJ/NX-series Motion Control Instructions Refer-
ence Manual (Cat. No. W508).
When you use the standard functions of the MC Function Module, if the synchronized control instruc-
tions are executed between axes assigned to different tasks in the multi-motion, an Illegal Master Axis
Specification (event code: 54620000 hex) occurs.
However, you can perform synchronized control of the master axis that is controlled in the primary peri-
odic task and the slave axis that is controlled in the priority-5 periodic task by using the MC_Period-
icSyncVariables (Periodic Axis Variable Synchronization between Tasks) instruction.
The cam operation and gear operation synchronized with the master axis and slave axis are available
for the following combinations.
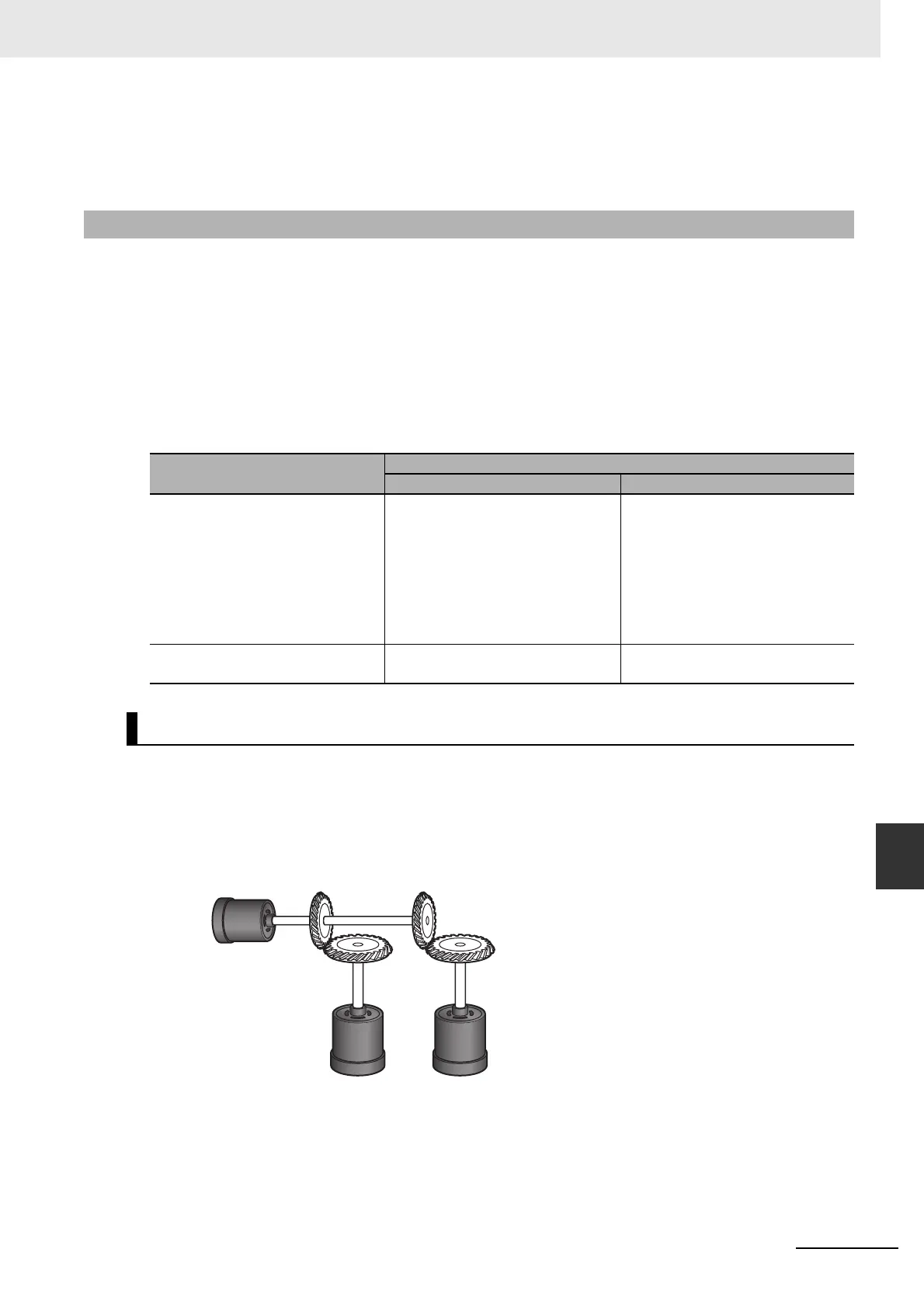
In the following figure, axis 1 is the master axis. Axis 2 is a slave axis that requires high-speed and
high-precision control. It is assigned to the primary periodic task. Axis 3 is a slave axis that does not
require precision. It is assigned to a priority-5 periodic task. The master axis (axis 1) is assigned to the
primary periodic task.
Physical Axis Composition
9-2-10 Achieving Synchronized Control in Multi-motion
Mster axis task
Slave axis task
Primary periodic task Priority-5 periodic task
Primray periodic task Synchronized by motion control
instructions
Synchronized control is achieved
by executing the
MC_PeriodicSyncVariables
(Periodic Axis Variable
Synchronization between Tasks)
instruction and using the virtual
master axis in the priority-5 periodic
task.
Priority-5 periodic task Not available. Synchronized by motion control
instructions
Axis Composition in Operation Examples
1 : 2 2 : 3
Axis 1
Axis 2 Axis 3

 Loading...
Loading...







