1-11
1 Introduction to the Motion Control Function Module
NJ/NX-series CPU Unit Motion Control User’s Manual (W507)
1-4 Specifications
1
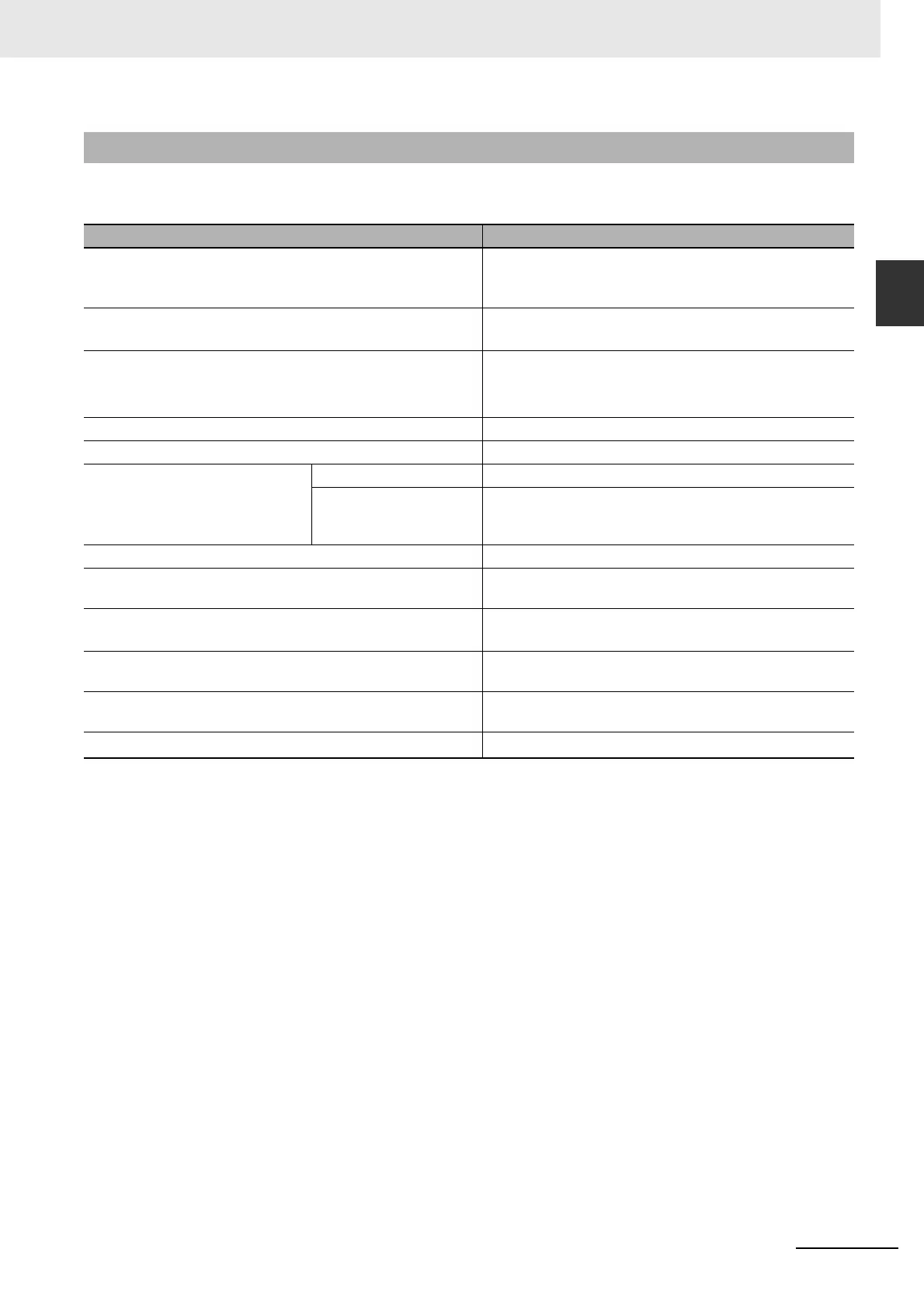
1-4-3 Function Specifications
The following table describes the functions that are supported for connections to OMRON control
devices.
1-4-3 Function Specifications
Item Description
Controllable Servo Drives OMRON 1S-series Servo Drives with built-in EtherCAT
communications or G5-series Servo Drives with built-in
EtherCAT communications
*1
(*)
Controllable encoder input terminals OMRON GX-series GX-EC0211/EC0241 EtherCAT
Remote I/O Terminals
*2
Controllable Position Interface Units
*3
(*)
OMRON NX-EC0 Incremental Encoder Input Units
OMRON NX-ECS SSI Input Units
OMRON NX-PG0 Pulse Output Units
Control method Control commands using EtherCAT communications
Control modes Position control, Velocity control, and Torque control
Unit conversions Position units Pulse, mm, μm, nm, degree, and inch
Electronic gear ratio Pulse per motor rotation/travel distance per motor rotation,
or (Pulse per motor rotation × Motor gear ratio)/(Work
travel distance per rotation × Work gear ratio)
Positions that can be managed Command positions and actual positions
Axis types Servo axes, Virtual servo axes, Encoder axes, and Virtual
encoder axes
Position command values Negative or positive long reals (LREAL) or 0 (command
units
*4
)
Velocity command values Negative or positive long reals (LREAL) or 0 (command
units/s)
Acceleration command values and deceleration command val-
ues
Positive long reals (LREAL) or 0 (command units/s
2
)
Jerk command values
Positive long reals (LREAL) or 0 (command units/s
3
)

 Loading...
Loading...







