1 Introduction to the Motion Control Function Module
1-12
NJ/NX-series CPU Unit Motion Control User’s Manual (W507)
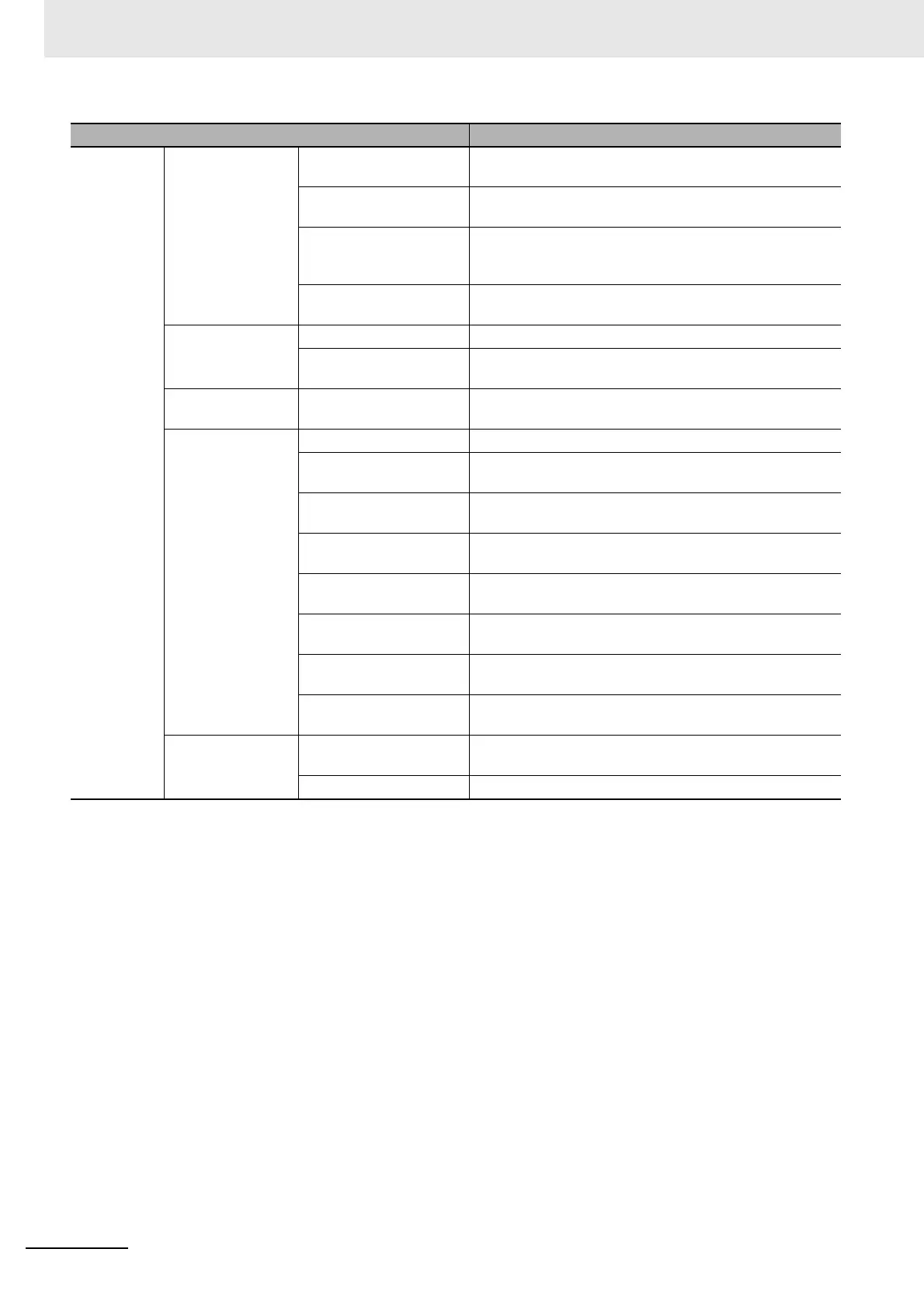
Single axes Single-axis posi-
tion control
Absolute positioning Positioning is performed for a target position that is speci-
fied with an absolute value.
Relative positioning Positioning is performed for a specified travel distance
from the command current position.
Interrupt feeding Positioning is performed for a specified travel distance
from the position where an interrupt input was received
from an external input.
Cyclic synchronous abso-
lute positioning (*)
A command position is output each control period in Posi-
tion Control Mode.
Single-axis veloc-
ity control
Velocity control Velocity control is performed in Position Control Mode.
Cyclic synchronous
velocity control
A velocity command is output each control period in Veloc-
ity Control Mode.
Single-axis torque
control
Torque control The torque of the motor is controlled.
Single-axis syn-
chronized control
Starting cam operation A cam motion is performed using the specified cam table.
Ending cam operation The cam motion for the axis that is specified with the input
parameter is ended.
Starting gear operation A gear motion with the specified gear ratio is performed
between a master axis and slave axis.
Positioning gear opera-
tion
A gear motion with the specified gear ratio and sync posi-
tion is performed between a master axis and slave axis.
Ending gear operation The specified gear motion or positioning gear motion is
ended.
Synchronous positioning Positioning is performed in sync with a specified master
axis.
Master axis phase shift The phase of a master axis in synchronized control is
shifted.
Combining axes The command positions of two axes are added or sub-
tracted and the result is output as the command position.
Single-axis manual
operation
Powering the Servo The Servo in the Servo Drive is turned ON to enable axis
motion.
Jogging An axis is jogged at a specified target velocity.
Item Description

 Loading...
Loading...







