Appendices
A-36
NJ/NX-series CPU Unit Motion Control User’s Manual (W507)
A-7 Version Information
This section describes the functions that are supported for each unit version. Refer to the NJ/NX-series
CPU Unit Software User’s Manual (Cat. No. W501) for the relationship between the unit versions of
CPU Units and the Sysmac Studio versions. Refer to the NJ/NX-series Motion Control Instructions Ref-
erence Manual (Cat. No. W508) for version information on the motion control instructions.
Version 1.02 or higher of the Sysmac Studio is required to use the functions that were added for unit
version 1.01 of the CPU Unit.
Version 1.03 or higher of the Sysmac Studio is required to use the functions that were added for unit
version 1.02 of the CPU Unit.
No motion control functions were added for unit version 1.02, but the specifications of some instructions
were improved. Refer to the NJ/NX-series Motion Control Instructions Reference Manual (Cat. No.
W508) for version information on the motion control instructions.
Version 1.04 or higher of the Sysmac Studio is required to use the functions that were added for unit
version 1.03 of the CPU Unit.
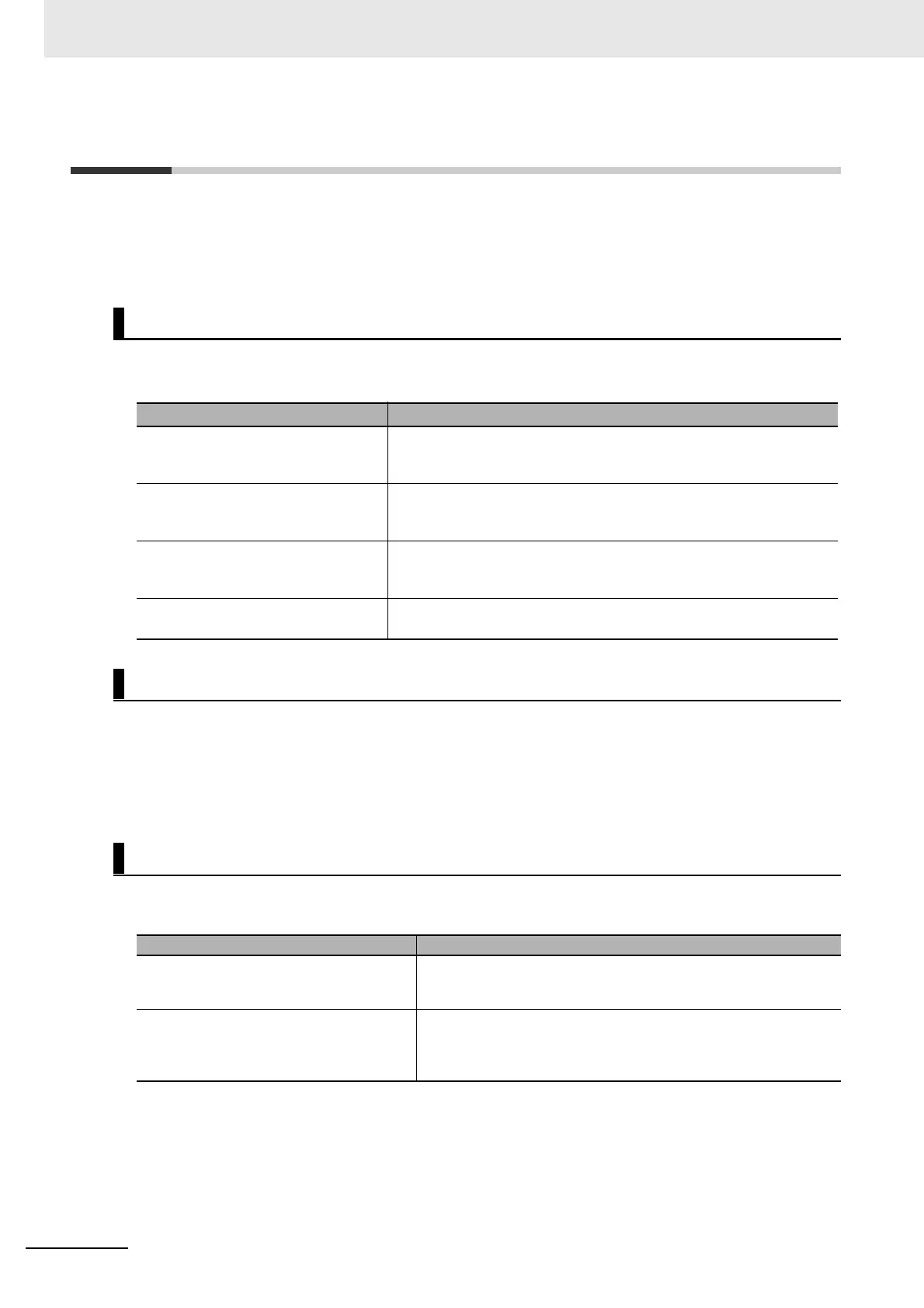
Motion Control Functions That Were Added for Unit Version 1.01
Function Outline
Changing the axes in an axes group You can use the MC_ChangeAxesInGroup (Change Axes in Group)
instruction to temporarily change the Composition Axes axes group
parameter for an axes group.
Reading axes group positions You can use the MC_GroupReadPosition (Read Axes Group Position)
instruction to read the command current positions and the actual cur-
rent positions of an axes group.
Axes group cyclic synchronous abso-
lute positioning
You can use the MC_GroupSyncMoveAboslute (Axes Group Cyclic
Synchronous Absolute Positioning) instruction to cyclically output the
specified target positions for the axes.
Controllable Servo Drives Support was added for OMRON G5-series Linear Motor Type Servo-
motors/Servo Drives with built-in EtherCAT communications.
Motion Control Functions That Were Added for Unit Version 1.02
Motion Control Functions That Were Added for Unit Version 1.03
Function Overview
Cyclic synchronous absolute positioning The MC_SyncMoveAbsolute (Cyclic Synchronous Absolute Posi-
tioning) instruction can be used to output a command position each
control period in Position Control Mode.
Homing with parameters The MC_HomeWithParameter (Home with Parameters) instruction
can be used to specify the homing parameters and operate the
motor to determine home. It uses the limit signals, home proximity
signal, and home signal.

 Loading...
Loading...







