9 Motion Control Functions
9-78
NJ/NX-series CPU Unit Motion Control User’s Manual (W507)
Refer to the NX-series Position Interface Units User’s Manual (Cat. No. W524) for the differences
when you use NX-series Pulse Output Units.
Resetting the following error counter resets the following error to 0.
Use the MC_ResetFollowingError instruction in the user program to reset the following error counter.
You can use the MC_ResetFollowingError instruction for each axis during positioning or during homing.
If you execute a following error counter reset while the axis is in motion, the current motion control
instruction will be aborted and the command position will be set to the same value as the actual posi-
tion.
The home will remain defined even after executing a following error counter reset.
For details on resetting the following error counter, refer to the MC_ResetFollowingError instruction in
the NJ/NX-series Motion Control Instructions Reference Manual (Cat. No. W508).
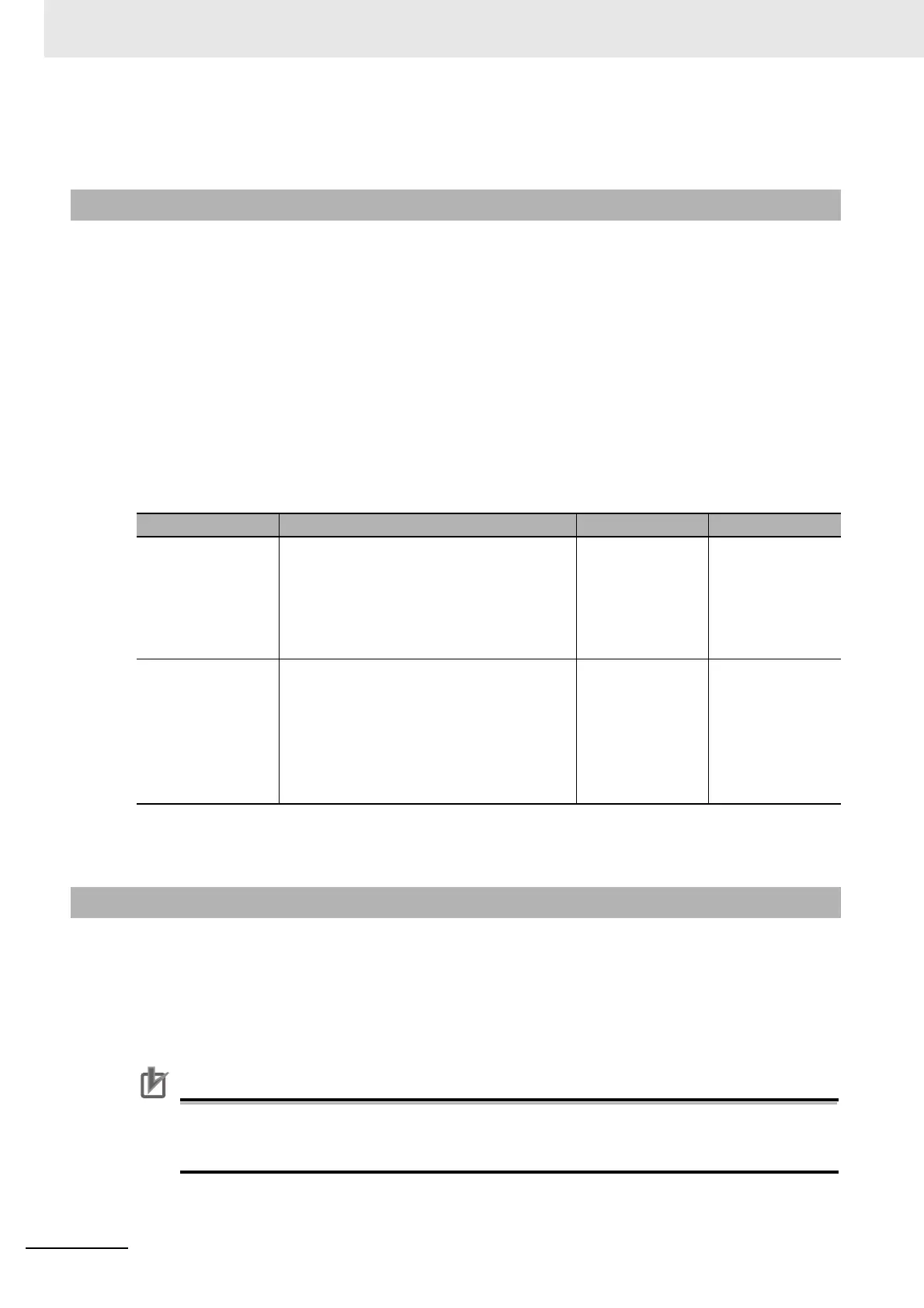
Axis Parameters That Are Related to Resetting the Following Error Counter
You can choose to reset the following error counter on an immediate stop, on a limit input stop, or
after homing is completed by setting the appropriate axis parameters. Set the axis parameters from
the Sysmac Studio.
Refer to the NX-series Position Interface Units User’s Manual (Cat. No. W524) for the differences
when you use NX-series Pulse Output Units.
You can monitor the amount of following error for the command position or the actual position between
two axes. Use the MC_AxesObserve (Monitor Axis Following Error) instruction to specify the permitted
following error and the two axes to monitor. If the permitted following error is exceeded, the Invalid out-
put variable for the Monitor Axis Following Error instruction will change to TRUE.
You can use this monitoring function to program the actions to take when the following error between
axes grows too large for gantry control and other devices where both axes perform the same operation.
Precautions for Correct UsePrecautions for Correct Use
Even if the permitted following error between axes is exceeded, no error will occur in the MC
Function Module. Check the Invalid output variable to stop axis operation or to take some other
action as appropriate in the user program.
For details on axis following error monitoring, refer to the MC_AxesObserve (Monitor Axis Following
Error) instruction in the NJ/NX-series Motion Control Instructions Reference Manual (Cat. No. W508).
9-8-7 Following Error Counter Reset
Parameter name Function Setting range Default
Immediate Stop
Input Stop Method
Set the stopping method in the MC Function
Module when the immediate stop input is
enabled.
0: Immediate stop
2: Immediate stop and error reset
3: Immediate stop and Servo OFF
0, 2, or 3 0
Limit Input Stop
Method
Set the stopping method in the MC Function
Module when the positive limit input or nega-
tive limit input is enabled.
0: Immediate stop
1: Deceleration stop
2: Immediate stop and error reset
3: Immediate stop and Servo OFF
0 to 3 0
9-8-8 Axis Following Error Monitoring

 Loading...
Loading...







