9 Motion Control Functions
9-30
NJ/NX-series CPU Unit Motion Control User’s Manual (W507)
The control mode of the Servo Drive is set to Velocity Control Mode and a command speed is output
every control period. To stop an axis, use the MC_Stop instruction or execute another motion control
instruction. If you specify a target velocity of 0, the axis will not move but the axis status will indicate that
it is moving.
The Servo Drive will receive commands in the velocity control loop. Therefore, if any disturbance
causes the velocity to decrease below the command velocity, no change in velocity will occur to remove
the following error.
For details, refer to the MC_SyncMoveVelocity (Cyclic Synchronous Velocity Control) instruction in the
NJ/NX-series Motion Control Instructions Reference Manual (Cat. No. W508).
Precautions for Correct UsePrecautions for Correct Use
You cannot use cyclic synchronous velocity control for an NX-series Pulse Output Unit.
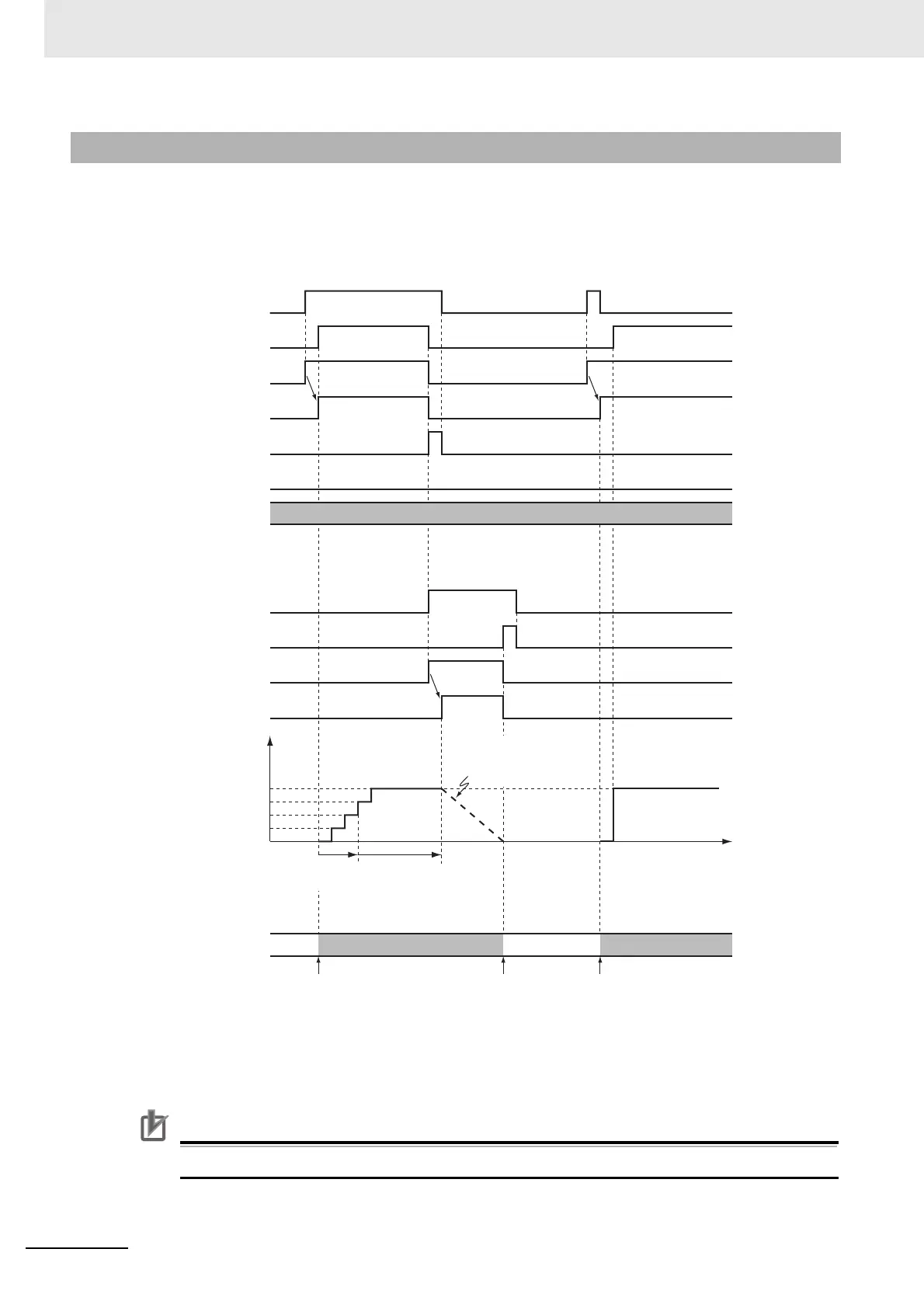
9-3-2 Cyclic Synchronous Velocity Control
Target velocity is not
changed.
Busy
InVelocity
CommandAborted
Active
Error
16#0000
ErrorID
Execute
Busy
Done
Active
Execute
CSP CSV CSP CSV
Velocity
Time
MC_SyncMoveVelocity Instruction
MC_Stop Instruction
Control Mode
Target velocity
Changed. Changed. Changed.
Deceleration stop
performed for the
MC_Stop instruction.
Target velocity is changed
every primary period.

 Loading...
Loading...







