3 Configuring Axes and Axes Groups
3-2
NJ/NX-series CPU Unit Motion Control User’s Manual (W507)
3-1 Axes
This section describes the axes that are used in a MC Function Module.
In a motion control system, the targets of motion control are called axes. An axis can be an actual
Servo Drive, encoder, or other device connected via EtherCAT communications or it can be a virtual
Servo Drive or encoder within the MC Function Module.
Although all axes of NX701 and NJ-series CPU Units are motion control axes, NX102 CPU Units and
NX1P2 CPU Units allow the use of single-axis position control axes in addition to motion control axes.
You can set each axis to Single-axis Position Control Axis in Control Function in the Axis Basic Set-
tings.
Refer to Control Function on page 5-10 for details on the control function.
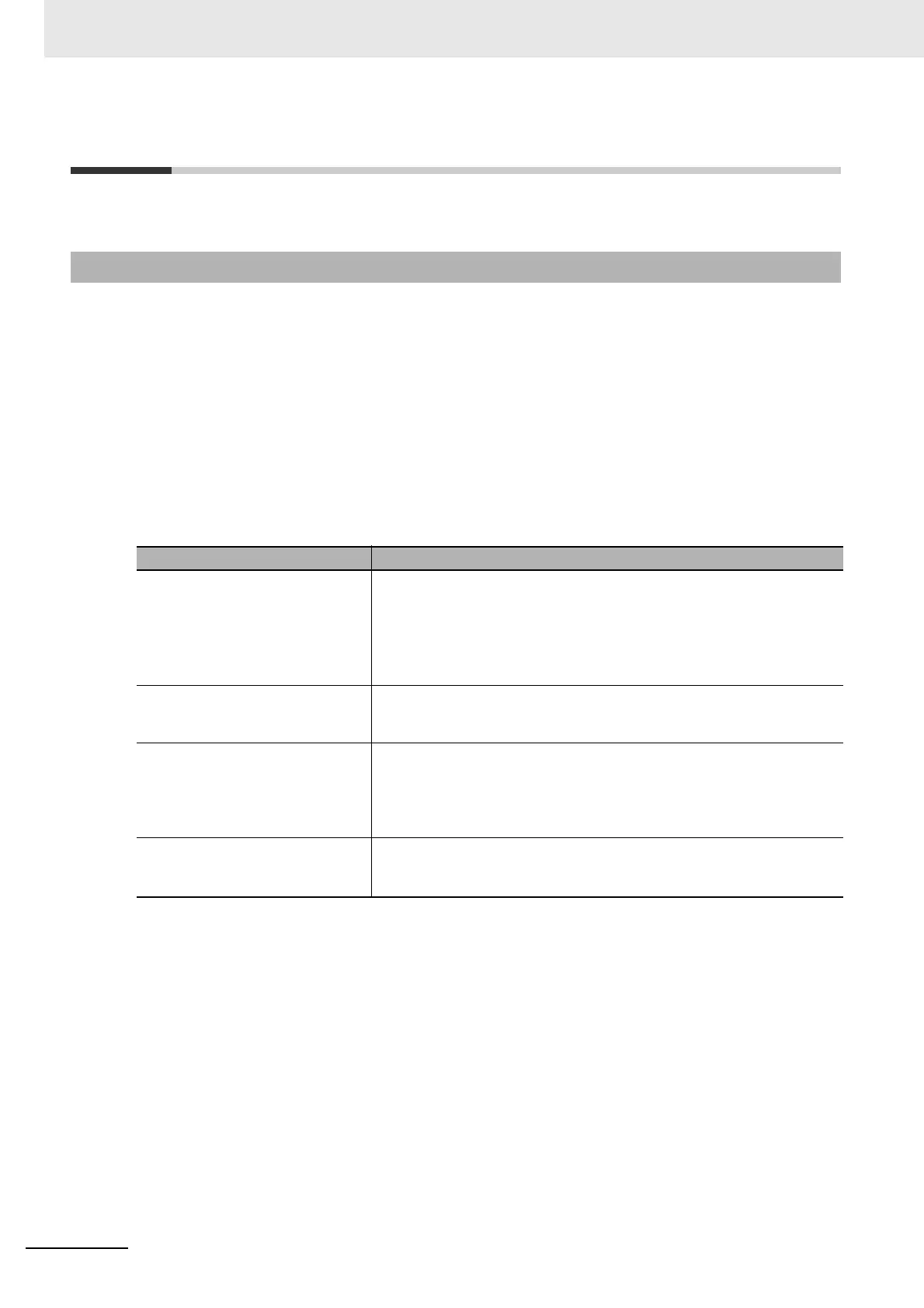
The MC Function Module supports the axis types that are given in the following table.
*1 Refer to 1-4-3 Function Specifications for the controllable devices.
*2 Virtual encoder axes are used in combination with motion control instructions that update the actual position of
the virtual encoder axis. Counting cannot be used with versions of the MC Function Module that do not support
these instructions.
3-1-1 Introduction to Axes
Axis type Description
Servo axis These axes are used by the EtherCAT slave Servo Drives and NX-series
Position Interface Units.
*1
They are assigned to actual Servo Drives or
other devices.
If you use NX-series Position Interface Units, you can assign more than
one device, such as a Pulse Output Unit and Digital Input Unit, to the same
axis.
Virtual servo axis These are virtual axes that exist only inside the MC Function Module. They
are not used by actual Servo Drives. For example, they are used as master
axes for synchronizing control.
Encoder axis These axes are used by the EtherCAT slave Encoder Input Terminals and
NX-series Position Interface Units.
*1
An encoder axis is assigned to an
actual encoder input terminal or other device. Encoder axes are assigned
to actual encoder input terminals. If one encoder input terminal contains
two encoder inputs, the individual encoder inputs will act as one axis.
Virtual encoder axis These axes are used virtually for encoder operation. A virtual encoder axis
is used temporarily in place of an encoder axis when there is no physical
encoder.
*2

 Loading...
Loading...







