9 Motion Control Functions
9-32
NJ/NX-series CPU Unit Motion Control User’s Manual (W507)
9-5 Common Functions for Single-axis
Control
This section describes the common functions used for single-axis control.
Refer to the NX-series Position Interface Units User’s Manual (Cat. No. W524) for the differences when
you use NX-series Pulse Output Units.
The MC Function Module uses the following two types of positions.
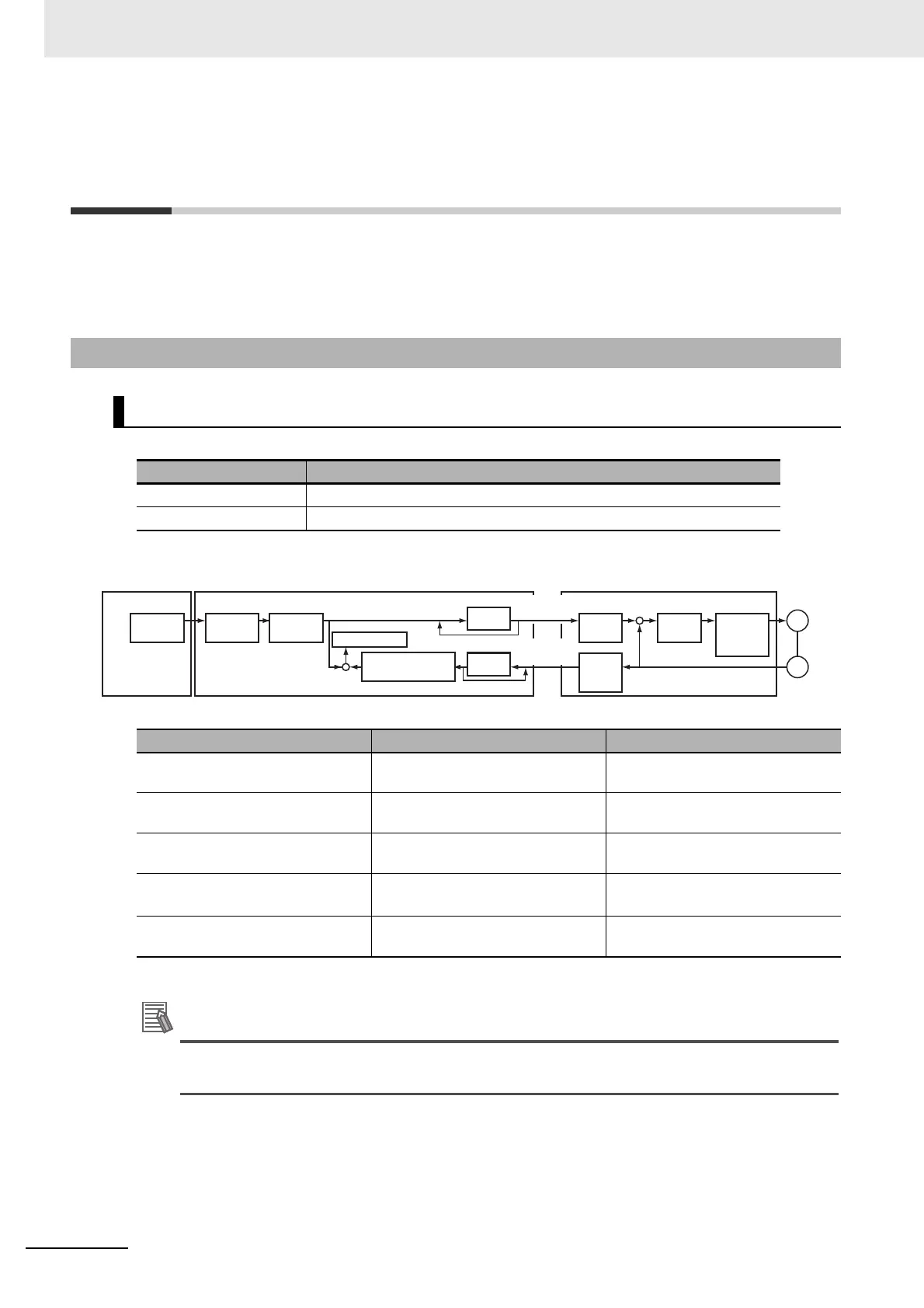
The following figure shows the relationship between the command position and the actual position for
an EtherCAT slave Servo Drive.
The command position and actual position share the following items.
* If there is any following error before the change, the following error value is maintained in the actual position.
Refer to the NX-series Position Interface Units User’s Manual (Cat. No. W524) for information on
the NX-series Position Interface Units.
9-5-1 Positions
Types of Positions
Type of position Definition
Command position This is the position that the MC Function Module outputs to control an axis.
Actual position The actual position as input from the Servo Drive or encoder input.
Item Command position Actual position
Count Mode You can set Linear Mode or Rotary
Mode.
The same Count Mode is used as
for the command position.
Position increment You can set one of the following:
mm, μm, nm, inch, degree, or pulse.
The unit is the same as the unit of
the command position.
Software limits You can set the range of operation
of the software.
The range is the same as the range
for the command position.
Changing the current position You can change the actual position
to any desired position.
This value will be set to the same
position as the command position.
*
Defining home Home is either defined or
undefined.
The status of home is the same as
the command position.
Servo Drive
Feedback
counter
Command
position
counter
Electronic
gear
In-position check
Electronic
gear
MC Function Module
Motion
control
instruction
User program
M
E
Motion
control
processing
Command
position
(command units)
Actual position
(command units)
Command position
(pulses)
Actual position
(pulses)
Following
error
counter
Position loop
Velocity loop
Current loop
Remainder
Remainder

 Loading...
Loading...







