9-33
9 Motion Control Functions
NJ/NX-series CPU Unit Motion Control User’s Manual (W507)
9-5 Common Functions for Single-axis Control
9
9-5-1 Positions
The actual position or distance for a positioning motion is specified with the Position (Target Position)
and Distance (Travel Distance) input variables to the motion control instruction.
You can read Axis Variables in the user program to monitor positions.
In the descriptions, a variable name _MC_AX[*] is used as an example, but the same information
applies to _MC1_AX[*] and _MC2_AX[*].
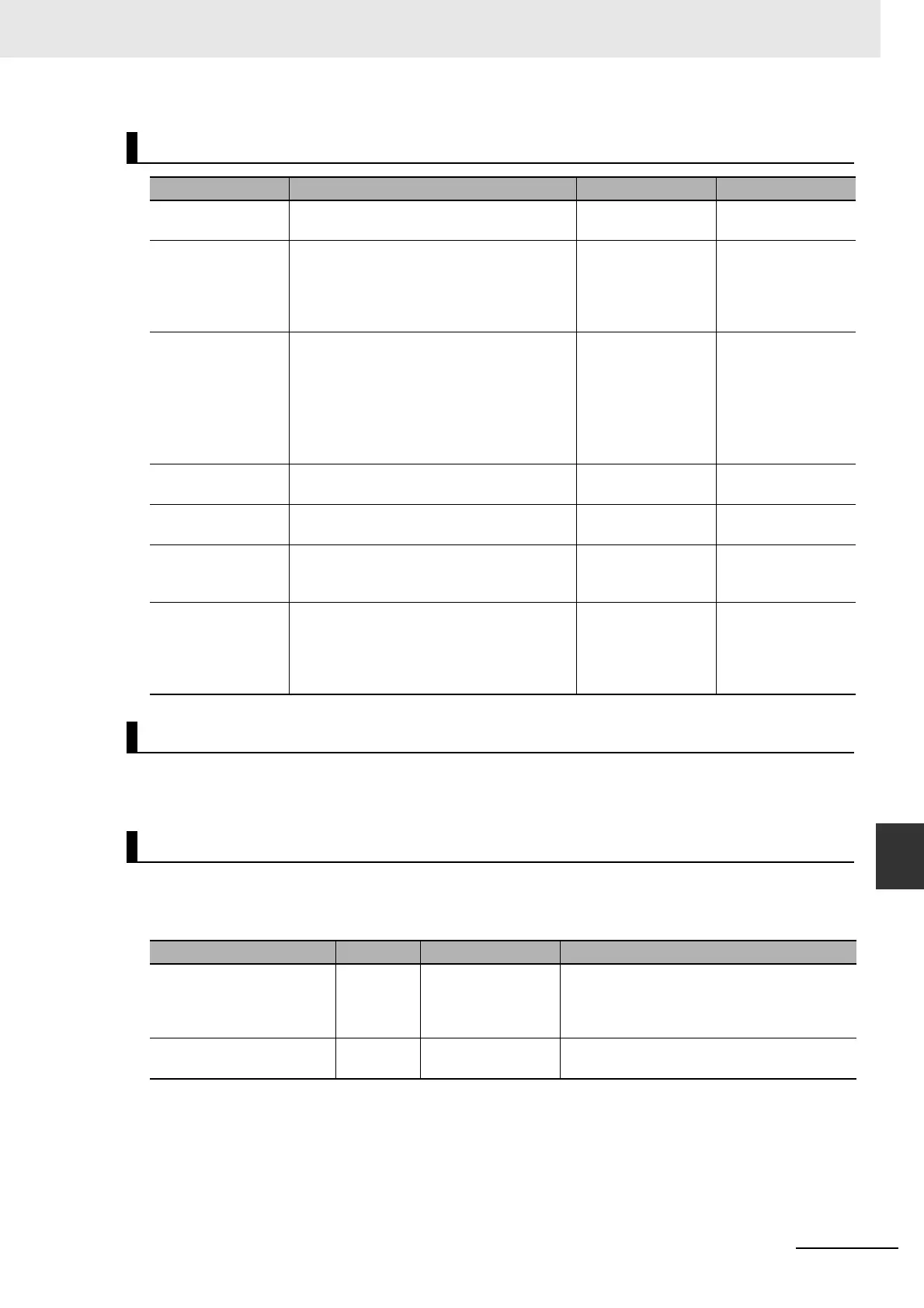
Axis Parameters That Are Related to Positions
Parameter name Function Setting range Default
In-position Range Set the in-position width. (Unit: command
units)
Non-negative long
reals
10
In-position Check
Time
Set the in-position check time in millisec-
onds. Set 0 to check for the end of position-
ing only when you define the home position
during homing and not check positioning at
other times. (Unit: ms)
0 to 10,000 0
Software Limits Select the software limit function.
0: Disabled.
1: Deceleration stop for command position
2: Immediate stop for command position
3: Deceleration stop for actual position
4: Immediate stop for actual position
0 to 4 0
Positive Software
Limit
Set the software limit in the positive direc-
tion. (Unit: command units)
Long reals 2,147,483,647
Negative Software
Limit
Set the software limit in the negative direc-
tion. (Unit: command units)
Long reals −2,147,483,648
Following Error Over
Value
Set the excessive following error check
value. Set 0 to disable the excessive follow-
ing error check. (Unit: command units)
Non-negative long
reals
0
Following Error
Warning Value
Set the following error warning check value.
Set 0 to disable the following error warning
check. (Unit: command units)
Non-negative long
reals that are less
than or equal to the
Following Error Over
Value
0
Specifying Target Positions for Axis Operations
Monitoring Positions
Variable name Data type Meaning Function
_MC_AX[0-255].Cmd.Pos LREAL Command Current
Position
This is the current value of the command posi-
tion. When the Servo is OFF and the mode is
not the position control mode, the actual cur-
rent position is output.
_MC_AX[0-255].Act.Pos LREAL Actual Current Posi-
tion
This is the actual current position.

 Loading...
Loading...







