9-73
9 Motion Control Functions
NJ/NX-series CPU Unit Motion Control User’s Manual (W507)
9-8 Other Functions
9
9-8-1 Changing the Current Position
9-8 Other Functions
This section describes other functions of the MC Function Module.
Refer to the NX-series Position Interface Units User’s Manual (Cat. No. W524) for the differences when
you use NX-series Pulse Output Units.
The command current position of a Servo axis can be changed to a specified value. The actual current
position changes to a value that maintains the current following error with the command current posi-
tion. For an encoder axis, you can change the actual current position. Use the MC_SetPosition instruc-
tion to specify the actual position you want to modify.
You can change the actual position even while an axis is in motion. If positioning to an absolute value is
being executed, positioning will be performed to the target position using the new absolute coordinates.
However, the travel distance will stay the same when you position to a relative value.
Precautions for Correct UsePrecautions for Correct Use
• When the Count Mode is Rotary Mode, an instruction error will occur if you specify a position
outside the ring counter range.
• After changing the current position the home will be undefined and you will not be able to use
the following functions and instructions.
Software limits
High-speed homing
Interpolation instructions (linear and circular interpolation)
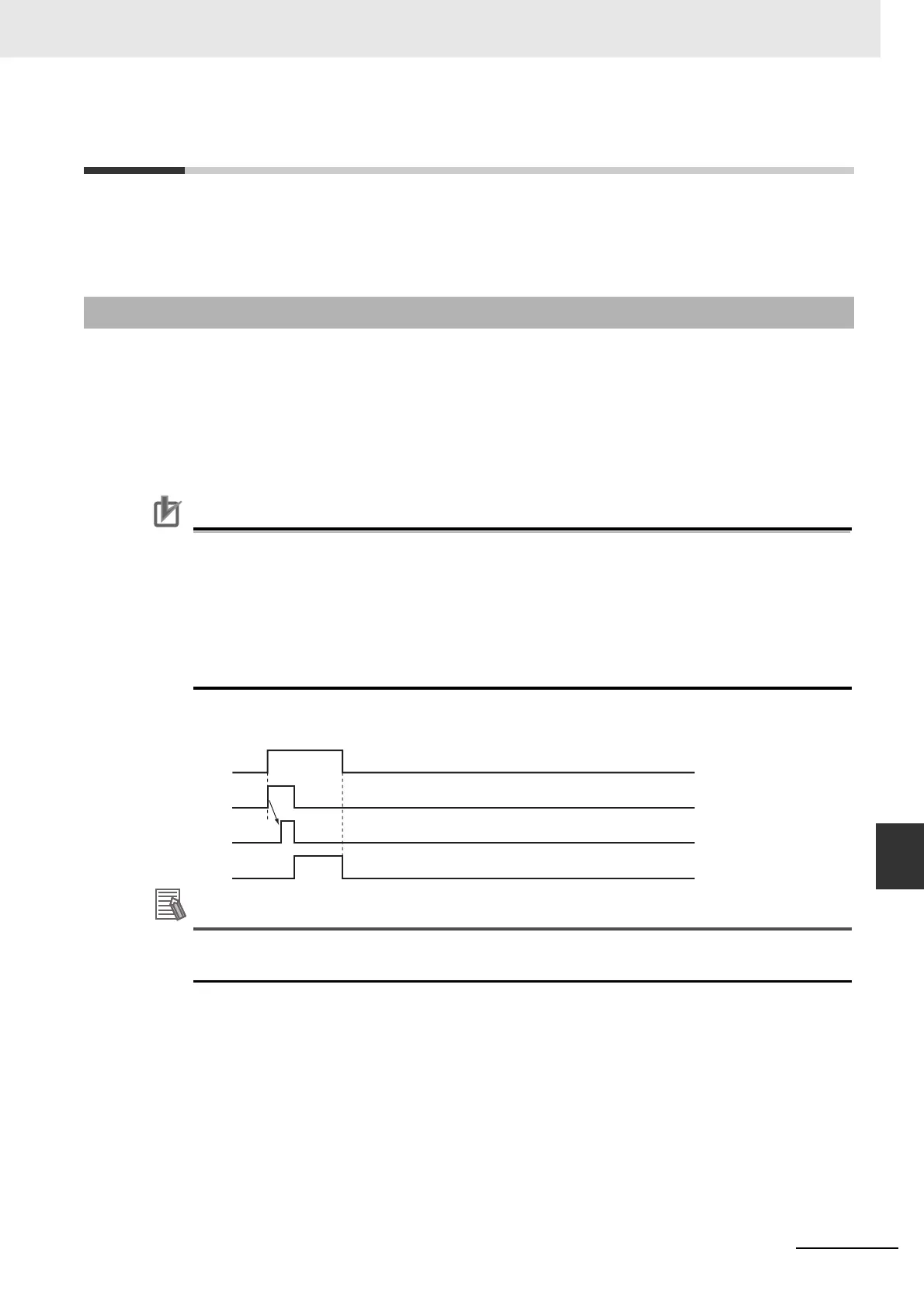
Timing Chart for Execution While Axis Is Stopped
You can change the actual position while home is defined by specifying a zero position preset for
the MC_Home or MC_HomeWithParameter instruction.
For details on the MC_SetPosition instruction, refer to the NJ/NX-series Motion Control Instructions
Reference Manual (Cat. No. W508).
9-8-1 Changing the Current Position
Busy
Done
Active
Execute

 Loading...
Loading...







