1-3
1 Introduction to the Motion Control Function Module
NJ/NX-series CPU Unit Motion Control User’s Manual (W507)
1-2 System Configuration
1
1-2 System Configuration
The MC Function Module receives sensor signal status from devices and control panels. It receives
commands from the motion control instructions that are executed in the user program. It uses both of
these to perform motion control with the Servo Drives, Encoder Input Terminals, and NX-series Position
Interface Units.
The EtherCAT network configuration, the Slave Terminal configurations for EtherCAT Coupler Units,
and the Sysmac Studio are used for the MC Function Module.
EtherCAT Network Configuration
The MC Function Module performs control for Servo Drives and Encoder Input Terminals through
the EtherCAT master port that is built into the CPU Unit. The EtherCAT network configuration is
used to perform precise motion control in a fixed period with very little deviation.
Slave Terminal Configurations of EtherCAT Coupler Units
The MC Function Module uses the Position Interface Units that are mounted under an EtherCAT
Coupler Unit to output motor control pulses and read encoder inputs. You can also use this configu-
ration to perform precise motion control in a fixed period with very little deviation.
Sysmac Studio
The Sysmac Studio is connected to the peripheral USB port on the CPU Unit with a commercially
available USB cable. You can also connect it to the built-in EtherNet/IP port on the CPU Unit with
Ethernet cable.
Precautions for Correct UsePrecautions for Correct Use
Some of the functions of the MC Function Module are different when NX-series Position Inter-
face Units are used. Refer to the NX-series Position Interface Units User’s Manual (Cat. No.
W524) for details.
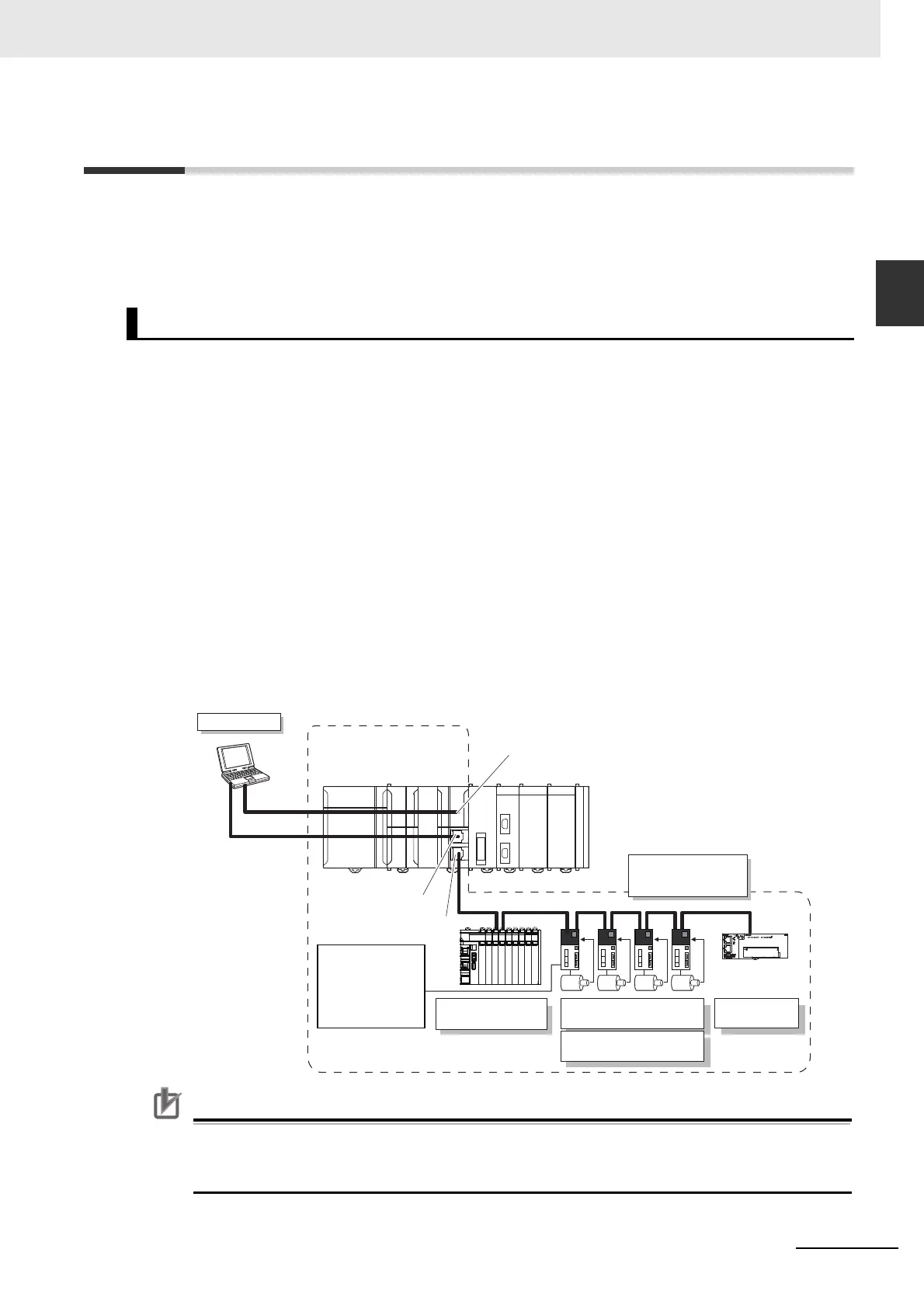
Motion Control Configuration on EtherCAT Network
Slave Terminal
Sysmac Studio
EtherCAT
EtherNet/IP
USB
LAN
Encoder Input
Terminal
1S-series Servo Drives with Built-in
EtherCAT Communications
G5-series Servo Drives with Built-in
EtherCAT Communications
NX701/NJ-series Controller
EtherCAT Network
Configuration
Power Supply Unit CPU Unit
Built-in EtherNet/IP port
Built-in EtherCAT port
Peripheral USB port
Or
Positive limit input
Negative limit input
Immediate stop input
Home proximity input
Home input
External latch input, etc.

 Loading...
Loading...







