9 Motion Control Functions
9-4
NJ/NX-series CPU Unit Motion Control User’s Manual (W507)
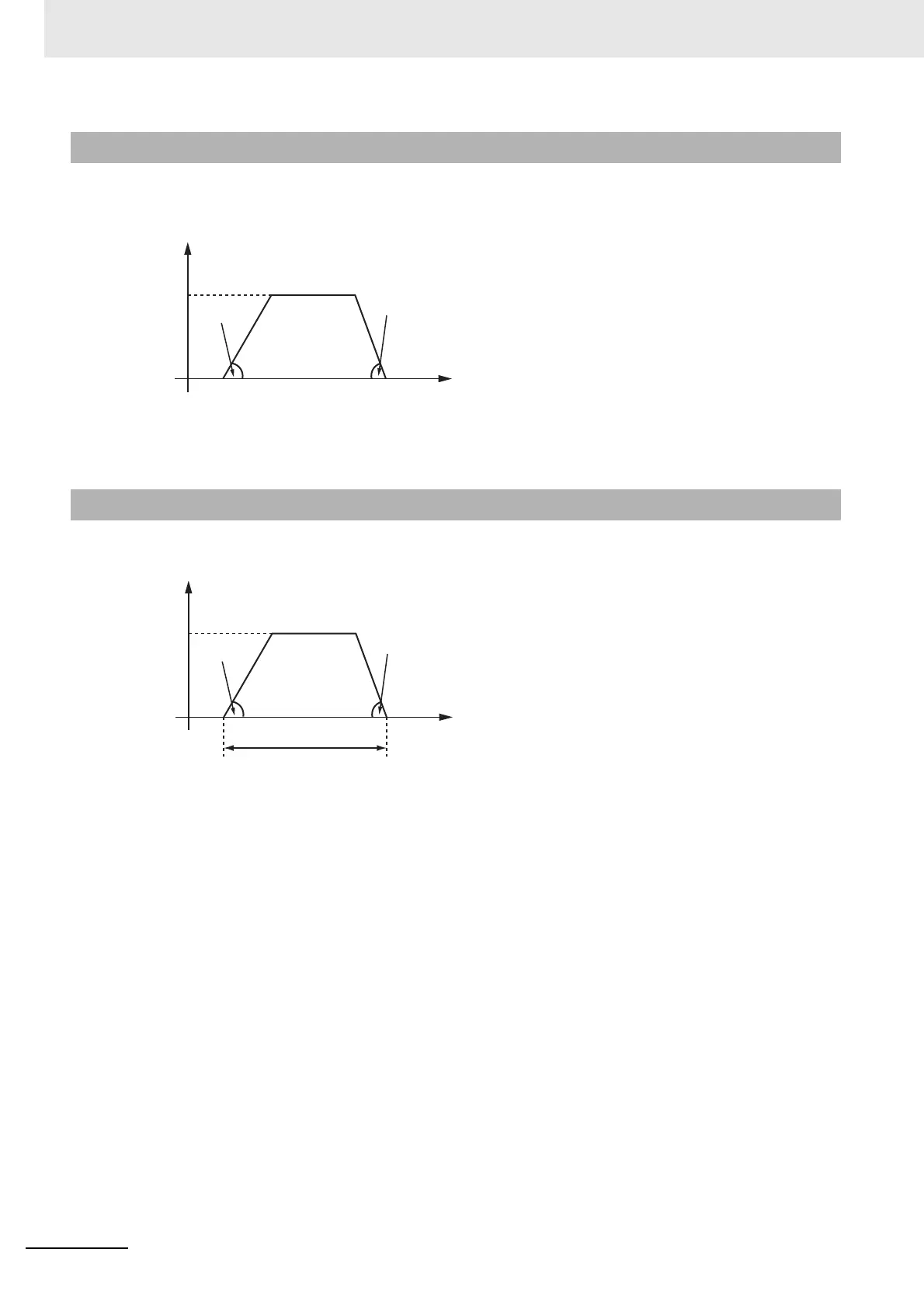
Absolute positioning specifies the absolute coordinates of the target position in relation to home. You
can perform positioning, such as shortest way positioning on a rotary table, by setting the Count Mode
to Rotary Mode and specifying the operation direction.
For details, refer to the MC_MoveAbsolute (Absolute Positioning) and MC_Move (Positioning) instruc-
tions in the NJ/NX-series Motion Control Instructions Reference Manual (Cat. No. W508).
Relative positioning specifies the distance from the actual position. You can specify a travel distance
that exceeds the ring counter range by setting the Count Mode to Rotary Mode.
For details, refer to the MC_MoveRelative (Relative Positioning) and MC_Move (Positioning) instruc-
tions in the NJ/NX-series Motion Control Instructions Reference Manual (Cat. No. W508).
9-1-2 Absolute Positioning
9-1-3 Relative Positioning
0
Deceleration
Velocity
Time
Acceleration
Target
velocity
Command
current position
Target position
0
Deceleration
Velocity
Time
Acceleration
Target
velocity
Command current position
Target distance

 Loading...
Loading...







