9-3
9 Motion Control Functions
NJ/NX-series CPU Unit Motion Control User’s Manual (W507)
9-1 Single-axis Position Control
9
9-1-1 Outline of Operation
9-1 Single-axis Position Control
The MC Function Module can be connected to OMRON 1S-series Servo Drives with built-in EtherCAT
communications or G5-series Servo Drives with built-in EtherCAT communications to implement posi-
tion control, velocity control, and torque control. This section describes positioning operation for single
axes.
Some of the functions of the MC Function Module are different when NX-series Pulse Output Units are
used. Refer to the NX-series Position Interface Units User’s Manual (Cat. No. W524) for details.
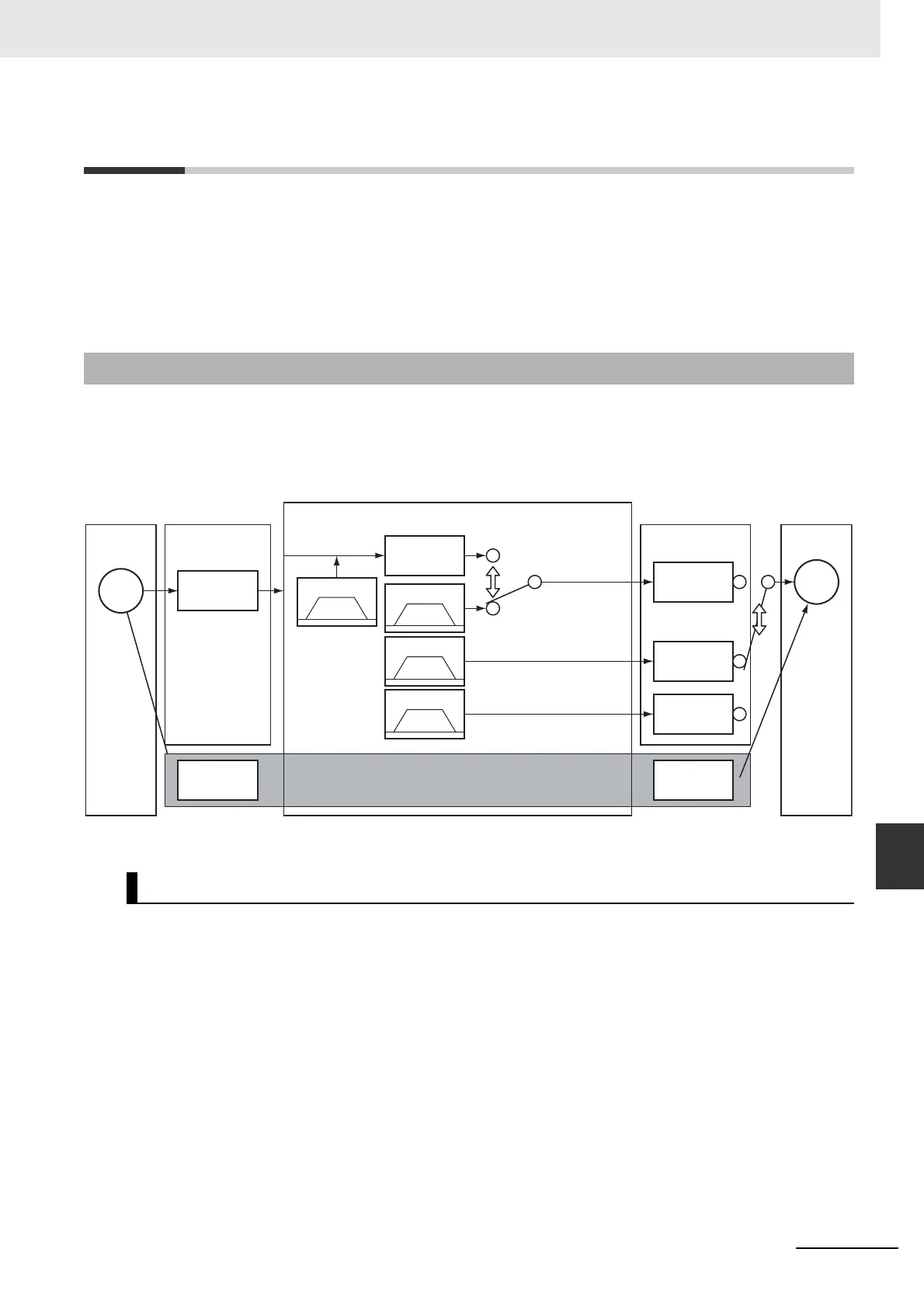
The single-axis control function of the MC Function Module consists of control for motion profile com-
mands and synchronized control. There are three Control Modes for motion profile commands: position
control, velocity control, and torque control. In synchronized control, the slave axis (i.e., the axis being
controlled) operates in a synchronized relationship to the master axis, as expressed by a cam profile
curve or a gear ratio. Manual operations such as jogging and homing are also supported.
Note You can use the command position or actual position as the input to the synchronization processing.
If an error occurs in an axis, you can use the MC_Reset instruction to remove the error once you have
eliminated the cause.
For details on resetting axis errors, refer to the MC_Reset (Reset Axis Error) instruction in the NJ/NX-
series Motion Control Instructions Reference Manual (Cat. No. W508).
Refer to the NX-series Position Interface Units User’s Manual (Cat. No. W524) for the differences when
you use NX-series Pulse Output Units.
9-1-1 Outline of Operation
Resetting Axis Errors
+
I/O processing for EtherCAT slave
EtherCAT
slave
Commands
Command
position
External
output
Command
torque
Command
velocity
Synchronization
processing
Phasing
Actual
position
Feedback
Input
EtherCAT
slave
External
input
Position processing
Velocity processing
Torque processing
Output

 Loading...
Loading...







