2 Motion Control Configuration and Principles
2-20
NJ/NX-series CPU Unit Motion Control User’s Manual (W507)
2-4 EtherCAT Communications and
Motion Control
The MC Function Module controls Servo Drives, counters, and NX-series Position Interface Units
through the PDO communications of the EtherCAT Master Function Module in the CPU Unit. This sec-
tion describes EtherCAT communications and other items related to the MC Function Module.
The MC Function Module exchanges data with the slaves on EtherCAT using the CAN application pro-
tocol over EtherCAT (CoE). With CoE, the parameters and control information held by the slaves are
specified according to data specifications of the object dictionary (OD). To communicate the data
between the Controller (communications master) and slaves, two methods are used: process data
objects (PDOs), which periodically exchange data in realtime, and service data objects (SDOs), which
exchange data when required.
The MC Function Module uses PDO communications for commands to refresh I/O data, such as data
for Servomotor position control, on a fixed control period. It uses SDO communications for commands
to read and write data at specified times, such as for parameter transfers.
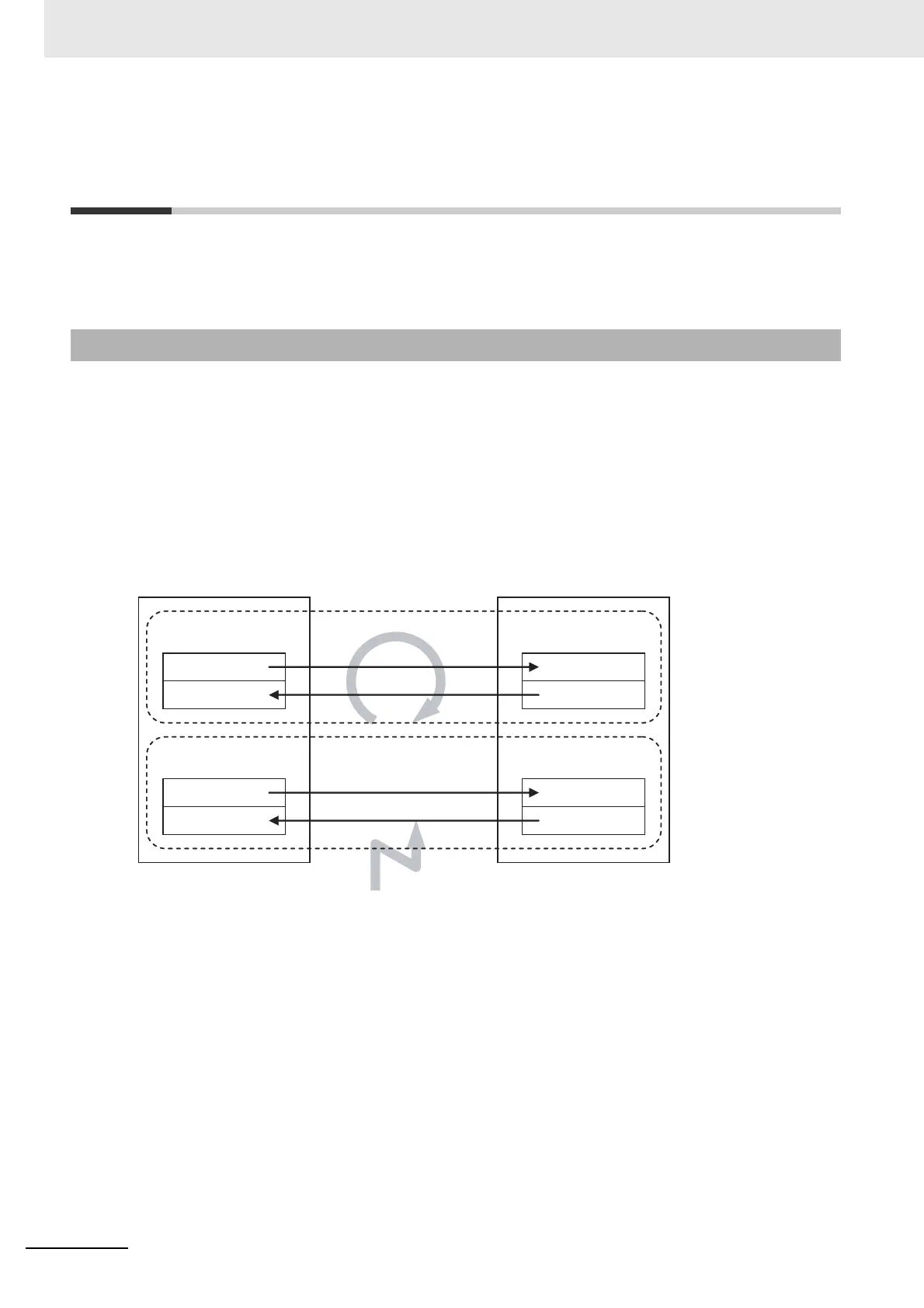
2-4-1 CAN Application Protocol over EtherCAT (CoE)
Controller
(communications master)
Slaves
Output data
Input data
Write data
Read data
Executed periodically.
Executed for requests.
PDO communications
SDO communications
EtherCAT
communications lines

 Loading...
Loading...







