2-19
2 Motion Control Configuration and Principles
NJ/NX-series CPU Unit Motion Control User’s Manual (W507)
2-3 Motion Control Principles
2
2-3-2 Example of Task Operations for Motion Control
If you have processes that require high-speed motion control and processes that do not require high-
speed motion control for the same axis, you can place the motion control instructions (FB) both in the
primary periodic task and in a priority-16 periodic task.
If motion control instructions (FB) are executed in both tasks within the period of the priority-16 periodic
task, the MC Function Module will perform motion processing for instructions in the primary periodic
task first.
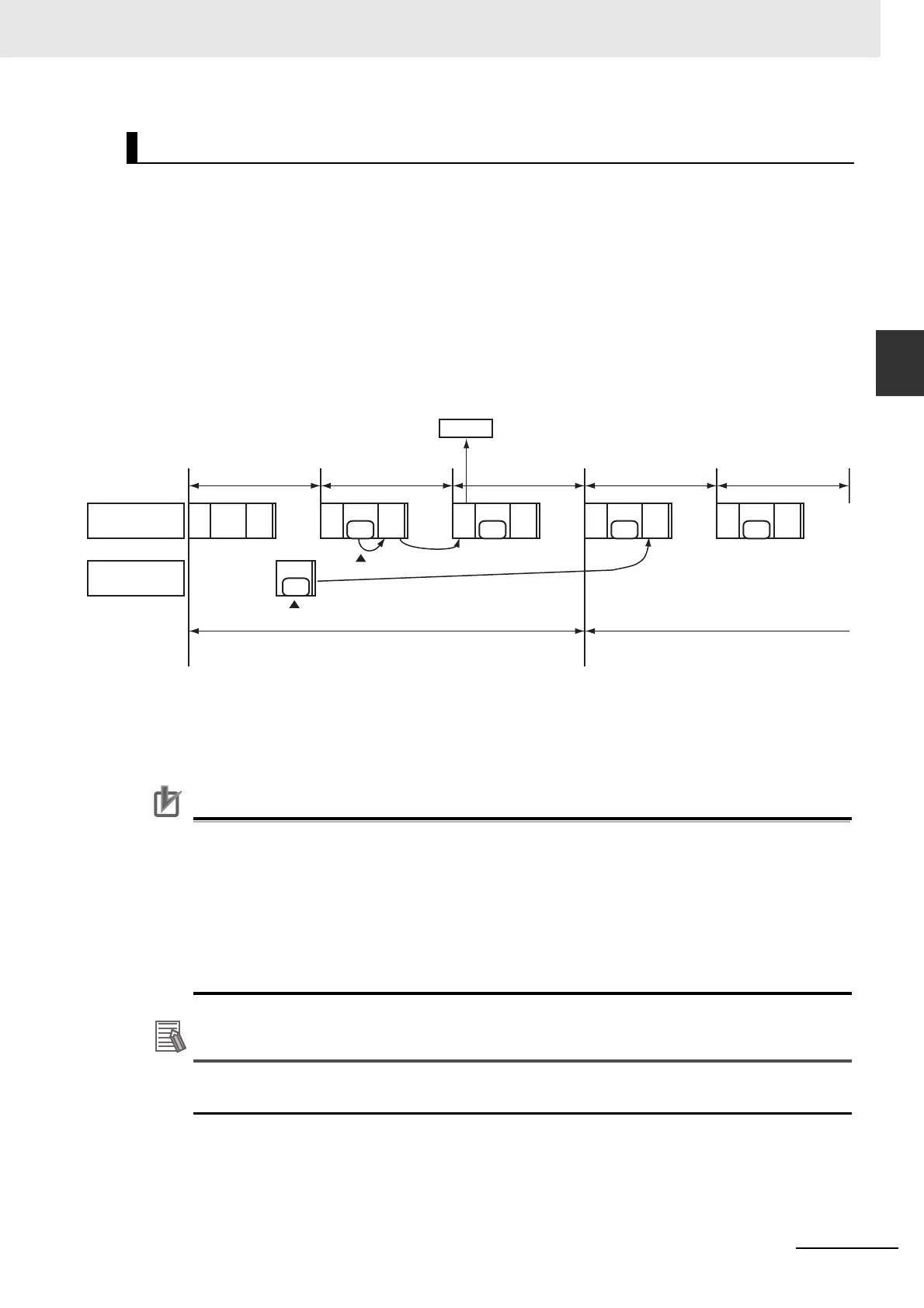
For example, the MC_MoveAbsolute instruction is executed in the priority-16 periodic task. Then, the
MC_MoveRelative is executed for the same axis in the primary periodic task. The operation for this is
shown below.
• The MC Function Module will execute MC_MoveRelative first. MC_MoveAbsolute is executed with
multi-execution of instructions.
The values of output variables for a motion control instruction and the values of system-defined vari-
ables for motion control will change during the I/O refresh of the task that executed the instruction.
Therefore, you may notice different behavior depending on the task if you use motion control instruc-
tions for the same axis in different tasks. Make sure that you thoroughly understand the processes of
each task before you start to develop your user program.
Precautions for Correct UsePrecautions for Correct Use
• If you include motion control instructions for the same axis in both the primary periodic task
and the priority-16 periodic task, pay close attention to the following when you develop your
user program: the execution order of the motion control instructions, the timing of updates for
system-defined variables for motion control, and the output timing of command values.
• If you use system-defined variables for motion control for the same axis in multiple tasks, pay
close attention to the differences in timing for updating system-defined variables for motion
control when you develop your user program.
• You cannot use the priority-16 periodic task on NX102 CPU Units and NX1P2 CPU Units.
For information on multi-execution of instructions, refer to 9-5-7 Multi-execution of Motion Con-
trol Instructions (Buffer Mode).
Using Motion Control Instructions in Two Different Types of Tasks
UPG
FB1
UPG
IO MC
UPG
IO MC
UPG
IO MC
UPG
IO MC
UPG
IO MC
FB2 FB2 FB2 FB2
FB1: MC_MoveAbsolute
FB2: MC_MoveRelative
Execution command for MC_MoveRelative
Primary period
Servo
Priority-16
periodic task
Task period (primary period × 3)
Primary
periodic task
The instruction is buffered for
multi-execution of instructions.

 Loading...
Loading...







