5 Motion Control Parameters
5-26
NJ/NX-series CPU Unit Motion Control User’s Manual (W507)
The Count Mode is the feed mode for the axis. Select the count mode for the command positions for
each axis. There are two Count Modes: Linear Mode, which has a finite axis feed range and Rotary
Mode, which has an infinite axis feed range.
Linear Mode (Finite-length Axis)
• The linear mode is centered around 0. This mode is used for devices with a mechanically limited
range of motion, such as an XY stage.
• The setting range when the value is converted to pulses is 40 bits (signed integer: 0x8000000000
to 0x7FFFFFFFFF).
• You cannot specify a target position for relative or absolute positioning that exceeds this range.
• A command position overflow or underflow observation will occur if this range is exceeded for
operations that do not have a target position, such as velocity control, homing, or torque control.
Command position output will continue, but the actual position is not updated and will be fixed to
either the upper limit or the lower limit.
• While the value of the actual position is fixed, you can execute commands and stop the axis with
any operation that does not have a target position in the direction toward the linear range. Any
command that specifies a direction away from the range will cause an error on execution of the
instruction.
• The actual position does not update until the overflow or underflow status is cleared.
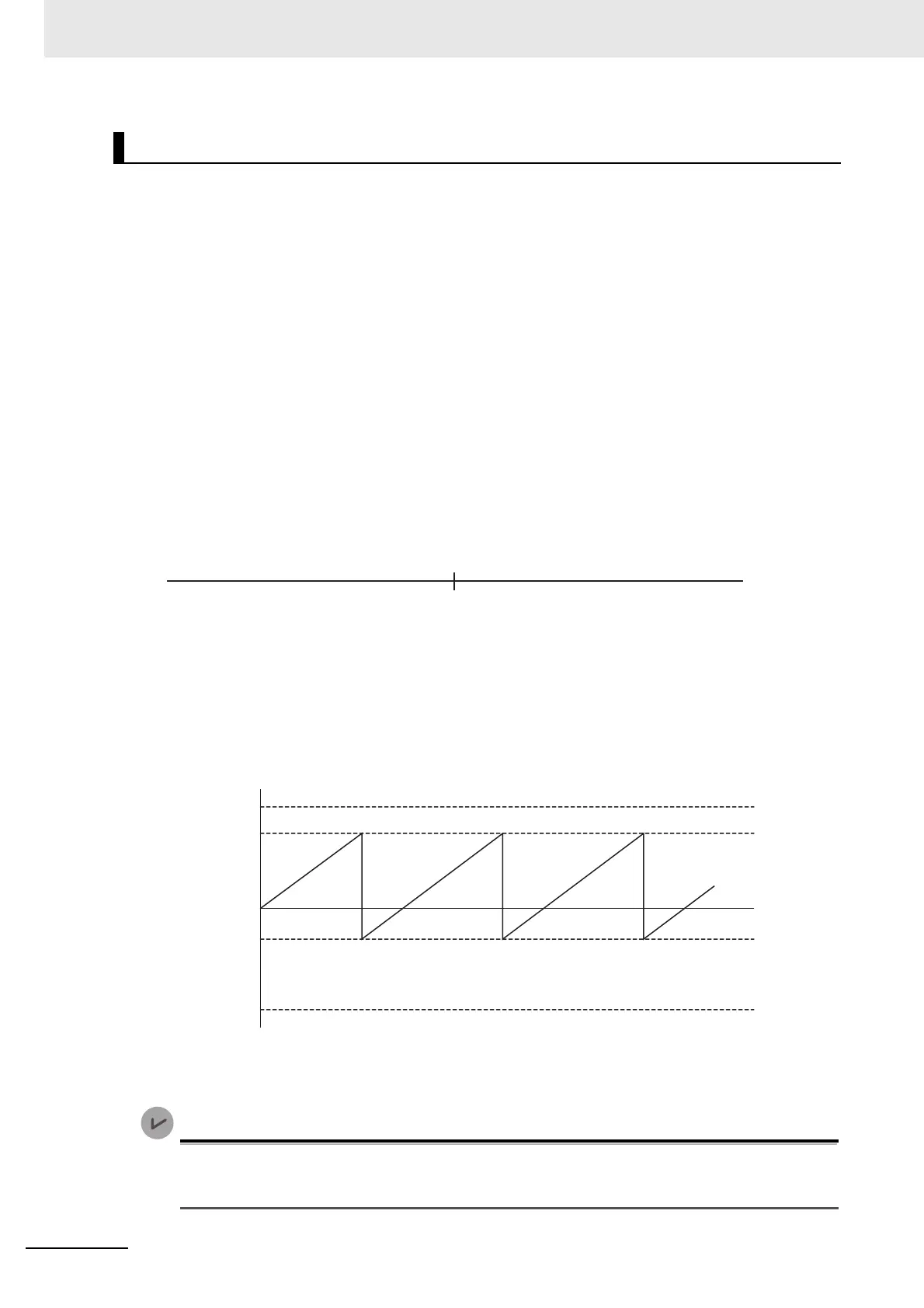
Rotary Mode (Infinite Length Axis)
• This mode repeatedly counts with a ring counter for an infinite amount within the set range. Use
this mode for rotary tables or winding shafts.
• Use the Sysmac Studio to set the modulo maximum position and the modulo minimum position to
define the range of the ring counter.
• The setting range when the value is converted to pulses is 40 bits (signed integer: 0x8000000000
to 0x7FFFFFFFFF).
• The number of pulses for one cycle of the ring counter may not be an expected integer because of
a calculation error for one cycle of the ring counter when converted to pulses. The unexpected
integer may cause the position offset.
Set to use the reducer when you use a CPU Unit with unit version 1.11 or later.
The cause of the above position offset will be canceled by setting to use the reducer.
Refer to 5-2-3 Unit Conversion Settings on page 5-13 on use of reducers.
Count Modes
0x8000000000 0x7FFFFFFFFF
0
0x8000000000
0x7FFFFFFFFF
0
Modulo minimum
position
Modulo maximum
position
Count value

 Loading...
Loading...







