6 Motion Control Programming
6-8
NJ/NX-series CPU Unit Motion Control User’s Manual (W507)
*1 The Error Deceleration Stopping state occurs both when the Servo is ON and when the Servo is OFF for the
axis.
Note You can monitor the axis status in the member variables of the Axis Variables _MC_AX[0].Status to
_MC_AX[255].Status.
For the NX701 CPU Unit, the variable names that start with _MC_AX[*] may apply to those
with _MC1_AX[*] and _MC2_AX[*].
Refer to the NX-series Position Interface Units User’s Manual (Cat. No. W524) for information on using
the NX-series Position Interface Units.
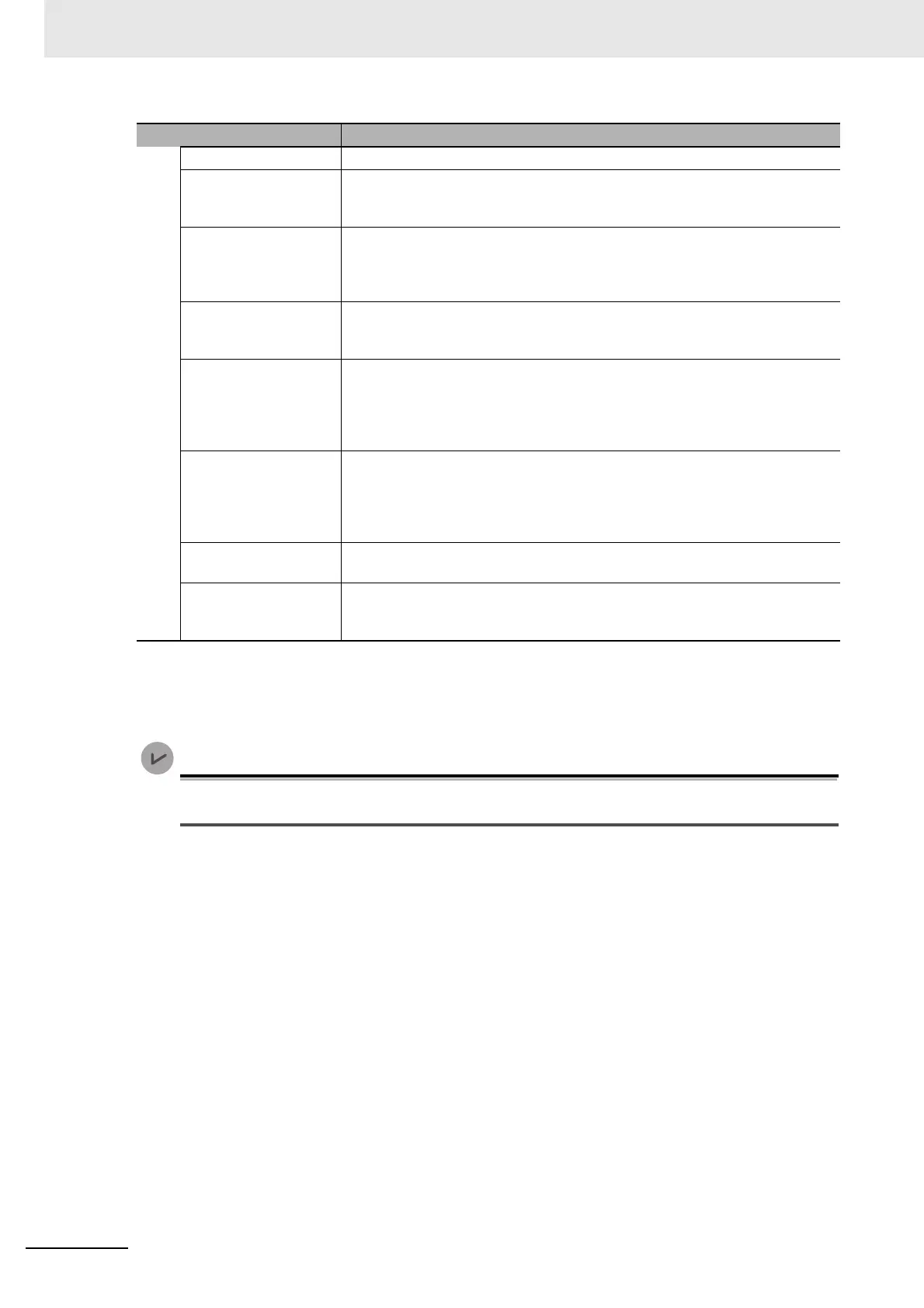
Stopped In this state, the Servo is ON for the axis and the axis is stopped.
Discrete Motion In this state, positioning is performed for the specified target position. This
includes when waiting the in-position status and when the velocity is 0 because
the override factor was set to 0 during a discrete motion.
Continuous Motion In this state, continuous motion control is executed with no specified target
position. This state exists during velocity control or torque control. This includes
when the velocity is 0 because the target velocity is set to 0 and when the
velocity is 0 due to an override factor set to 0 during continuous motion.
Synchronized Motion In this state, the synchronized control is performed for the axis with synchro-
nized control commands. This includes waiting for synchronization after chang-
ing to synchronized control instructions.
Deceleration Stopping In this state, the axis is stopping due to a MC_Stop or MC_TouchProbe (Enable
External Latch) instruction. This includes when Execute is TRUE after stopping
for the MC_Stop instruction. In this state, it is not possible to execute axis oper-
ation commands. If an attempt is made to execute one, CommandAborted for
the instruction changes to TRUE.
Error Deceleration
Stopping
*1
In this state, the Servo is ON for the axis and an axis error has occurred. This
includes during execution of the MC_ImmediateStop (Immediate Stop) instruc-
tion and during a deceleration stop for an axis error. It is not possible to execute
axis operation commands in this state. The instruction will enter the aborted
(CommandAborted = TRUE) status if executed.
Homing In this state, home is being searched for by the MC_Home or MC_HomeWith-
Parameter instruction.
Coordinated Motion In this state, the axes group was enabled by an instruction for an axes group
command. In this state, the axis is in motion for an axes group state of Group-
Moving, GroupStopping, or GroupErrorStop.
State name Definition

 Loading...
Loading...







