9-41
9 Motion Control Functions
NJ/NX-series CPU Unit Motion Control User’s Manual (W507)
9-5 Common Functions for Single-axis Control
9
9-5-5 Specifying the Operation Direction
Precautions for Correct UsePrecautions for Correct Use
Observe the following precautions on the operation direction of the previous operation.
• If the MC_Home or MC_HomeWithParameter instruction exceeds the point where the home
input was detected and reverses operation, the opposite direction of the home input detection
direction is used.
• If a homing compensation value is set for the MC_Home or MC_HomeWithParameter instruc-
tion, the axis will move in the direction of the compensation value.
• If an immediate stop is specified for the MC_TouchProbe (Enable External Latch) instruction,
the latch position may be exceeded and the direction may be reversed.
• The direction may be reversed for the MC_MoveFeed (Interrupt Feeding) instruction.
• When the MC_ResetFollowingError instruction is executed, the error is set to zero, so the
command direction is used.
• If an immediate stop is specified for an external input signal or resetting the error counter is
specified for stopping for a limit input, the operation may reverse direction toward the position
where the external input signal was received.
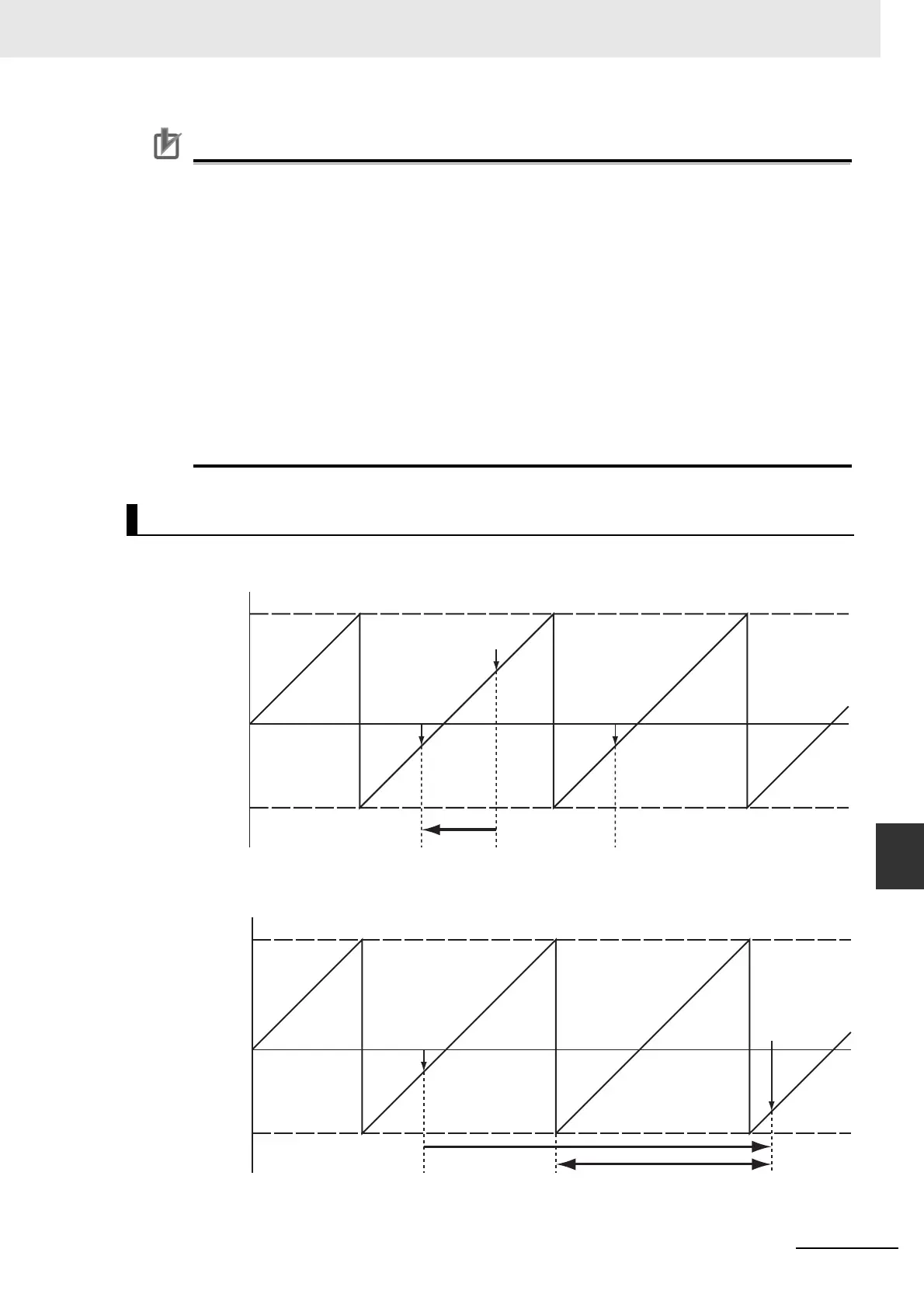
The following example illustrates when positioning is performed towards a target position of −20 when
the command current position is 50.
Similarly, the following example illustrates when the ring counter upper limit is 100, the lower limit is
−70, the command current position is −20, and positioning is performed towards a target position of
290.
Example for No Direction Specification
0
Moves towards the
ring counter range.
Target position:
−20
Command current position:
50
Modulo minimum
position setting
value: −70
Modulo maximum
position setting
value: 100
Target position:
−20
Performs relative positioning with target distance of (290
(target position) − 100 (upper limit)) = 190.
Command current
position: −20
Modulo minimum
position setting
value: −70
Modulo maximum
position setting
value: 100
Position after
positioning: −50
0
190

 Loading...
Loading...







