9 Motion Control Functions
9-48
NJ/NX-series CPU Unit Motion Control User’s Manual (W507)
This is the default mode. No buffering is performed in this mode. The current command is aborted and
the new instruction is executed. Aborting Mode can be used for multi-execution of instructions for
motion control instructions for both single-axis control and synchronized control.
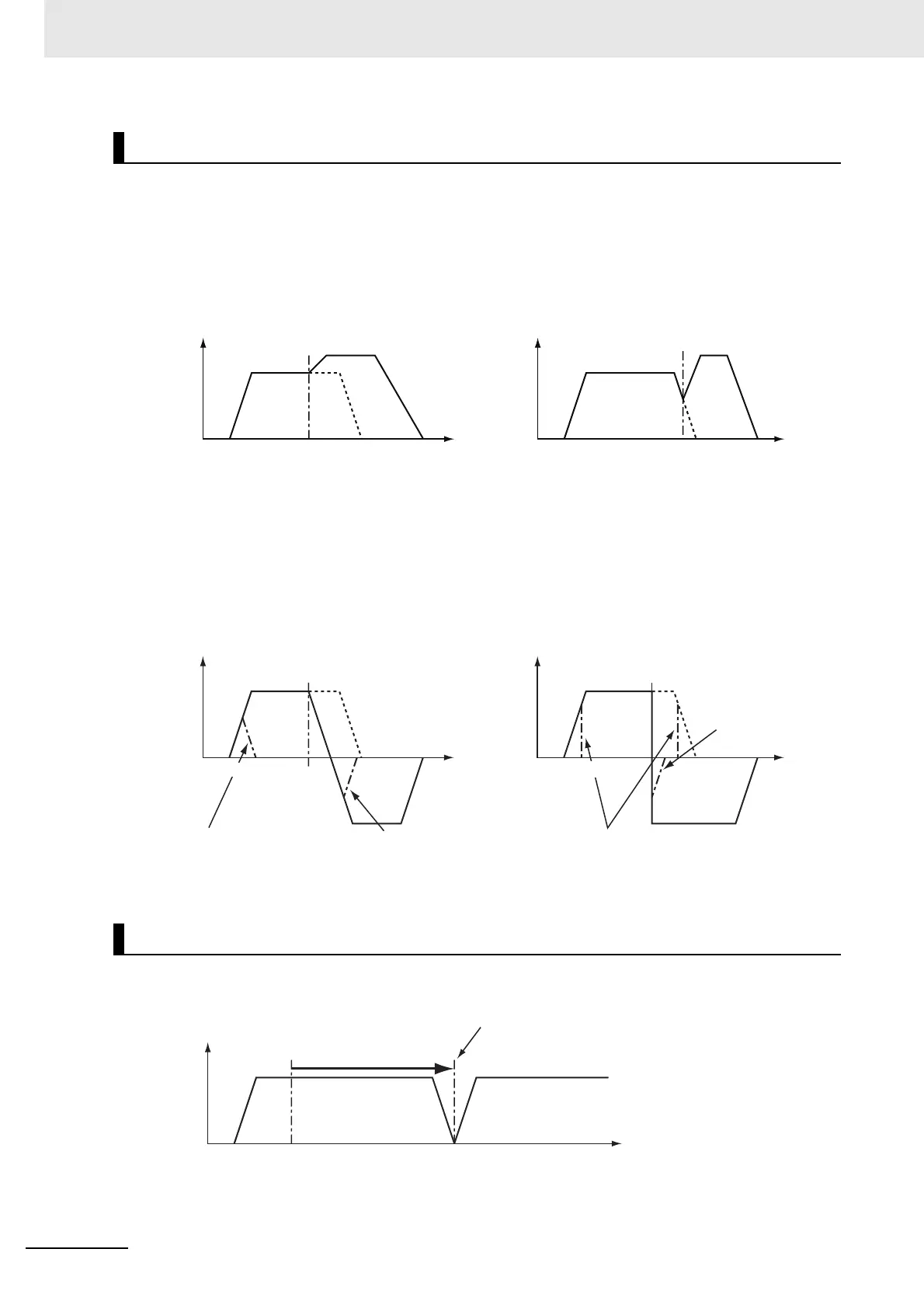
When a Reverse Turn Does Not Occur for the Command Position of the Multi-
execution Instruction
When a Reverse Turn Occurs for the Command Position of the Multi-
execution Instruction
The buffered instruction remains in the buffer until the operation of the current instruction is finished.
The buffered instruction is executed after the operation for the current instruction is normally ended.
Aborting
Buffered
↑Buffered
command
position
↑Initial
command
position
↓Multi-execution timing
↑Executed.
Velocity
Multi-execution during Acceleration/Deceleration
↑Buffered
command
position
↑Initial
command
position
↓Multi-execution timing
↑Executed.
Velocity
Executing More than One Instruction
during Constant-velocity Motion
If you use multi-execution of an instruction during
triangular control or during deceleration, the axis will
accelerate to the target velocity of the buffered instruction.
In some cases, the axis will not reach the target velocity.
Velocity
↑New
command
position
↑Initial
command
position
If the travel distance
upon reverse turn is
small, triangular control
is performed as it was
for the first execution of
the instruction.
↓Multi-execution timing
If the instruction is executed with multi-
execution of instructions during acceleration
or deceleration, the axis stops immediately
according to the multi-execution timing.
This also occurs during deceleration.
↑Executed.
Stopping Immediately after Reversing
If the travel distance upon
reverse turn is small, triangular
control is performed as it was for
the first execution of the
instruction.
↑Buffered
command
position
↓Initial command position
↓Multi-execution timing
If an instruction is executed with
multi-execution of instructions
during acceleration, the axis
starts deceleration according to
the multi-execution timing.
↑Executed.
Velocity
Decelerating to a Stop after Reversing
Velocity
Buffered instruction
The target position is reached
and the next command is
executed after the current
operation is normally finished.
Current instruction
↓Multi-execution timing
Time

 Loading...
Loading...







