MC_Axis000.MFaultLvl.Active
EN
FaultHandler
FaultHandler
Hm_Bsy
Hm_Ca
Hm_Err
Hm_ErrID
Hm_D
Done
Error
CommandAborted
Axis
Busy
ErrorID
Execute
HM
MC_Home
Axis
MC_Axis000
Pwr_Status MC_Axis000.Details.Homed
Restart_Ex
MC_Axis000.Details.Homed
ReExeSw
Mv_Abs_Act
Mv_Abs_Act
Mv_Abs_Ca
Mv_Abs_Err
Mv_Abs_ErrID
Mv_Abs_D
Done
Error
CommandAborted
Axis
Active
ErrorID
Execute
MV_ABS
MC_MoveAbsolute
Axis
MC_Axis000
Mv_Abs_Ex
Mv_Abs_Bsy
BusyPosition
Mv_Abs_Pos
Acceleration
LREAL#500.0
Jerk
Velocity
LREAL#500.0
Deceleration
LREAL#500.0
Direction
_eMC_DIRECTION#_mcPositiveDirection
BufferMode
1
Mv_Abs_Pos := LREAL#2000.0;
StartPg
Lock0
MC_Axis000.DrvStatus.Ready
PWR
Error
Axis Axis
Enable Status
Busy
MC_Power
ErrorID
Lock0
MC_Axis000
Pwr_Status
Pwr_Bsy
Pwr_Err
Pwr_ErrID
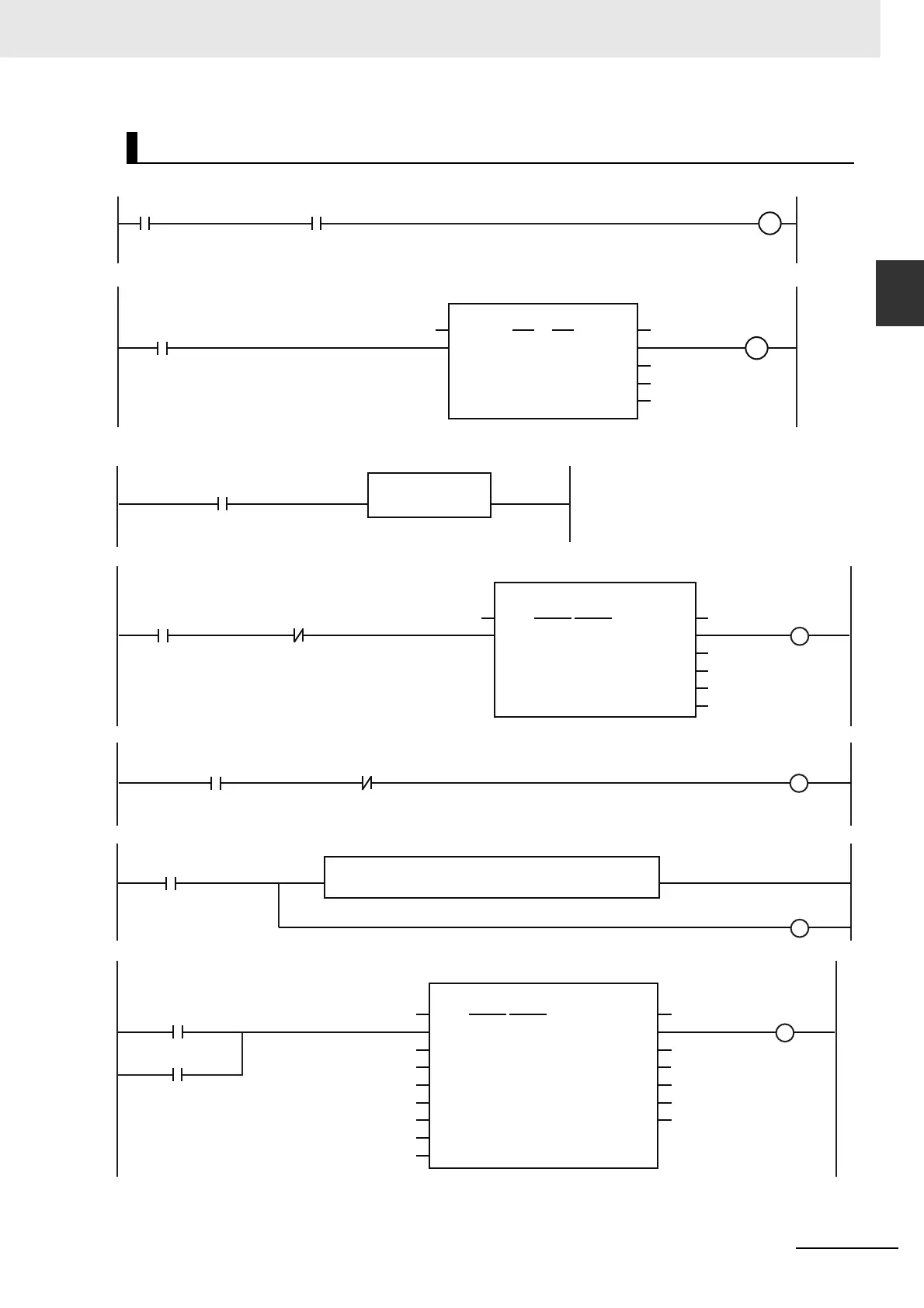
If the Servo Drive for axis 0 is ready, turn ON the Servo for axis 0.
Absolute positioning is executed according to the status of Mv_Abs_Ex.
If a minor fault level error occurs for axis 0, the error handler for the device (FaultHandler) is executed.
Program the FaultHandler according to the device.
If the Servo is ON for axis 0 and home is not defined, the MC_Home instruction is executed.
After home is defined for axis 0, absolute positioning is executed if it is not already in progress.
When ReExeSw changes to TRUE, the absolute positioning instruction is re-executed to change the target position to 2000.
Mv_Abs_Ex
Restart_Ex
Check if the Servo Drive for axis 0 is ready when StartPg is TRUE.

 Loading...
Loading...







