10 Sample Programming
10-42
NJ/NX-series CPU Unit Motion Control User’s Manual (W507)
// If the input parameters for interrupt feeding are not set, the target values and other parameters are set.
IF InitFlag=FALSE THEN
// Parameters for MC_MoveFeed
Mv_Feed_TrigRef.Mode := _eMC_TRIGGER_MODE#_mcDrive;
Mv_Feed_TrigRef.LatchID := _eMC_TRIGGER_LATCH_ID#_mcLatch1;
Mv_Feed_TrigRef.InputDrive := _eMC_TRIGGER_INPUT_DRIVE#_mcEncoderMark;
Mv_Feed_TrigVar := FALSE;
Mv_Feed_Pos := LREAL#2000.0;
Mv_Feed_Vel := LREAL#1000.0;
Mv_Feed_Acc := LREAL#10000.0;
Mv_Feed_Dec := LREAL#10000.0;
Mv_Feed_Dir := _eMC_DIRECTION#_mcCurrentDirection;
Mv_Feed_Mm := _eMC_MOVE_MODE#_mcVelocity;
Mv_Feed_FeedDis := LREAL#500.0;
Mv_Feed_FeedVel := LREAL#500.0;
// The Input Parameter Initialization Completed Flag is changed to TRUE.
InitFlag := TRUE;
END_IF;
// If the Servo Drive is ready when StartPg is TRUE, turn ON the Servo for axis 0.
IF (StartPg=TRUE)
AND (MC_Axis000.DrvStatus.Ready=TRUE) THEN
Pwr_En:=TRUE;
ELSE
Pwr_En:=FALSE;
END_IF;
// If a minor fault level error occurs for axis 0, the error handler for the device (FaultHandler) is executed.
// Program the FaultHandler according to the device.
IF MC_Axis000.MFaultLvl.Active=TRUE THEN
FaultHandler();
END_IF;
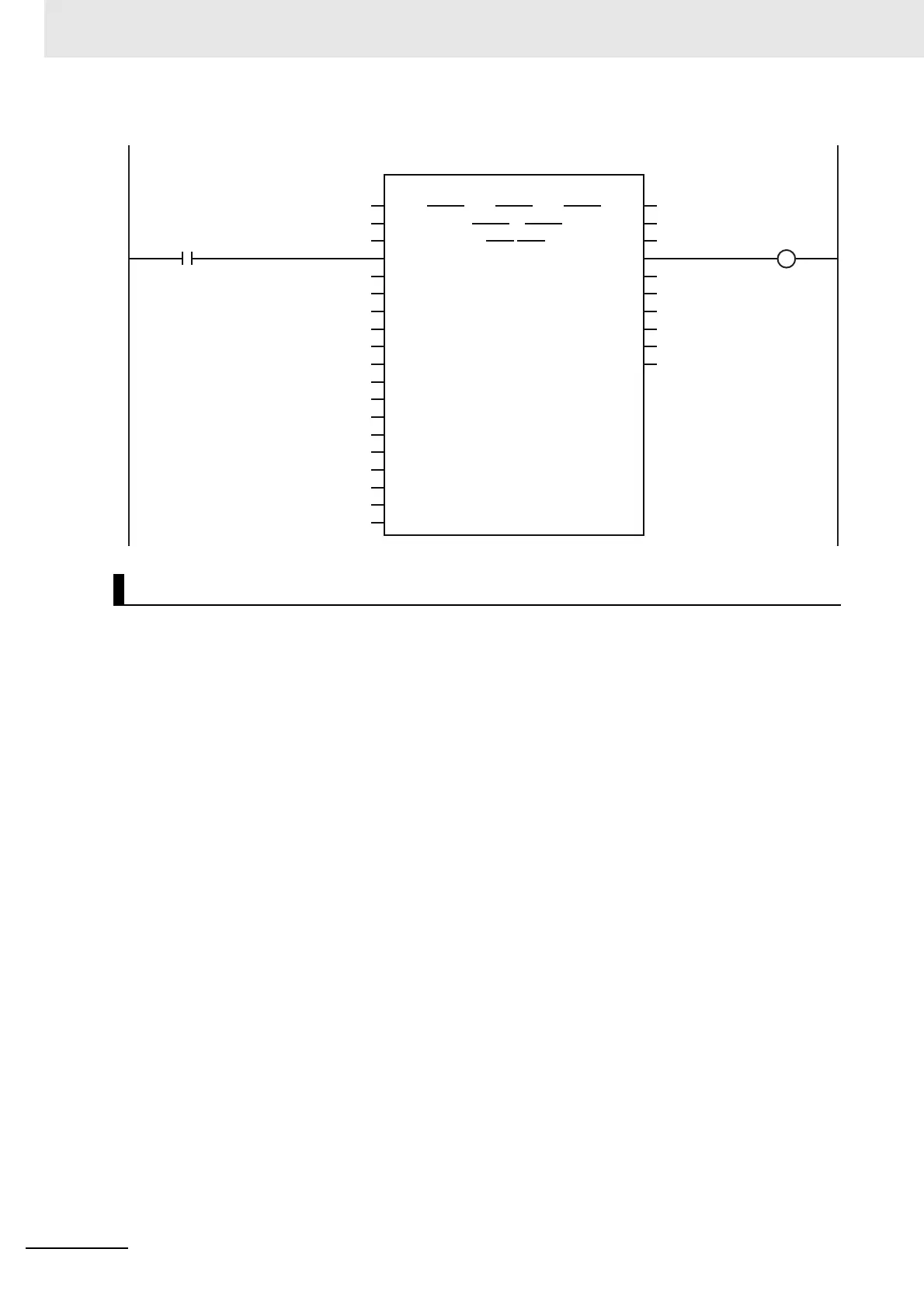
ST Programming
Mv_Feed_InFeed
Mv_Feed_Bsy
Mv_Feed_Act
Mv_Feed_D
MC_Axis000
Hm_D
Mv_Feed_Ca
MvFeed_TrigRef
Mv_Feed_TrigVar
Mv_Feed_Pos
WindowOnly InFeed
Error
ErrorID
CommandAbortedReferenceType
Active
Position
MC_MoveFeed
Execute Done
FirstPosition Busy
Axis Axis
TriggerInput TriggerInput
TriggerVariable TriggerVariable
Velocity
Acceleration
Deceleration
Jerk
Direction
MoveMode
FeedDistance
MV_FEED
LastPosition
FeedVelocity
BufferMode
ErrorDetect
Mv_Feed_Vel
Mv_Feed_Dec
Mv_Feed_Dir
Mv_Feed_Acc
Mv_Feed_Mm
Mv_Feed_FeedVel
Mv_Feed_FeedDis
Mv_Feed_Err
Mv_Feed_ErrID
If homing is completed, interrupt feeding is executed.

 Loading...
Loading...







